

5G Communication-Based Autonomous Train
A. Introduction
For safe train operation, it is necessary to regulate the position and speed of trains and supervise all driving conditions. The train control system is to achieve this purpose, it has evolved from massive hardware/electrical devices to software-based methods. With the development of train control systems, driverless train operation has been widely applied. The communication-based train control (CBTC) is the most up-to-date train control technology. It automatically protects against the collision of trains by maintaining a safe distance from a preceding train. For this purpose, there are onboard and wayside control units in the CBTC. The CBTC system commonly requires highly reliable control units on the ground because they have to deal with safety-related data. However, since these wayside control units have their own control zone, there are limits to expanding operational flexibility.
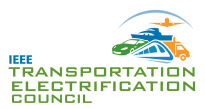
In this article, we present the autonomous train control system (ATCS) based on 5G communication. ATCS ensures safe train movement without the centralized wayside control units. In ATCS, trains share directly their dynamic running information with other trains and protect themselves by separating safely from a preceding train. Fig. 1 shows a brief comparison between conventional CBTC and ATCS configurations. In the CBTC system, the wayside control units, such as a zone controller and an electronic interlocking, regulate the position and speed of each train with complex control paths. However, in ATCS, the train can control itself based on train-to-train communication [1]-[2]. We introduce the fundamental principles of ATCS and report its demonstration results.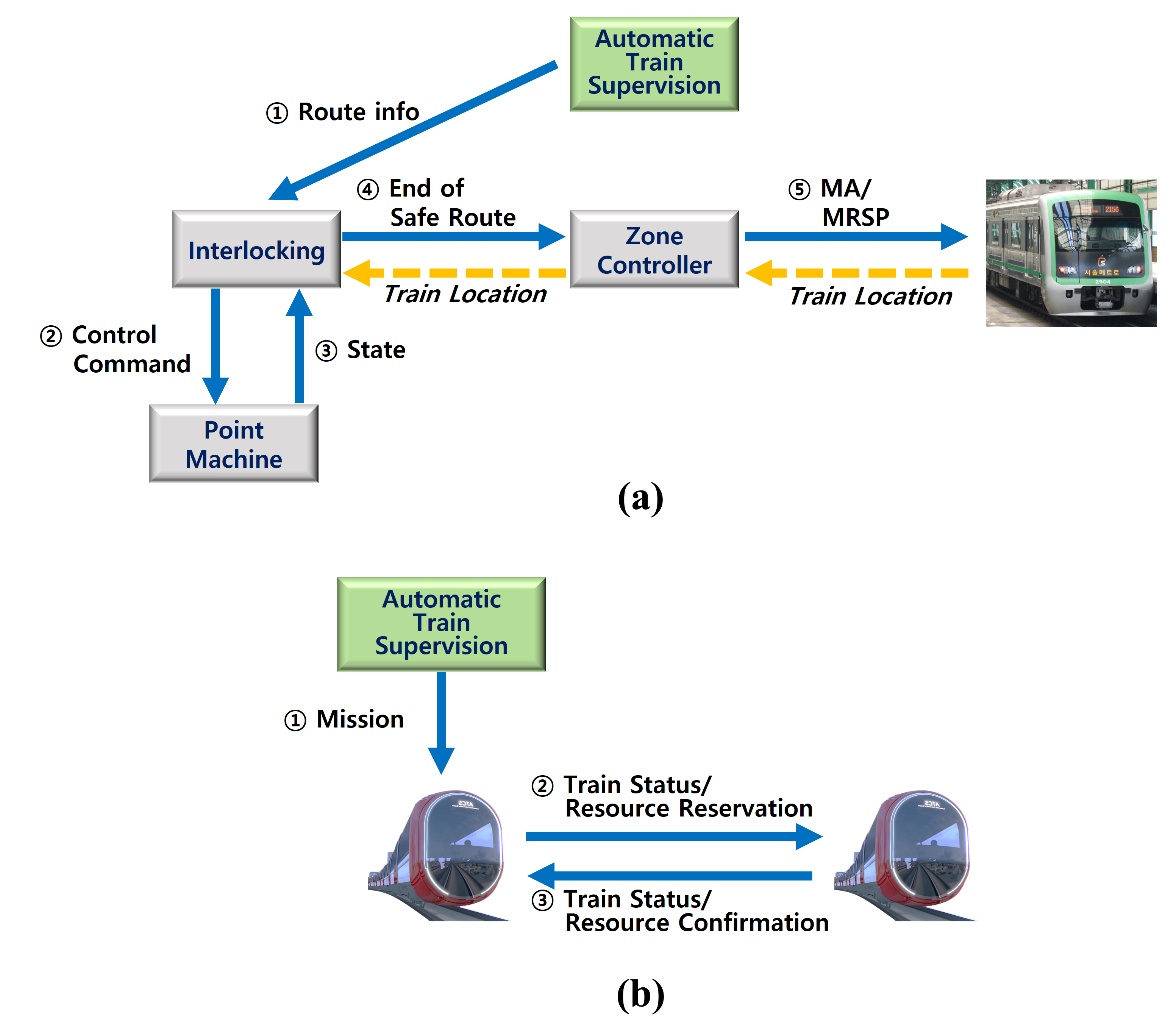
Fig. 1: Comparison between (a) CBTC and (b) ATCS.
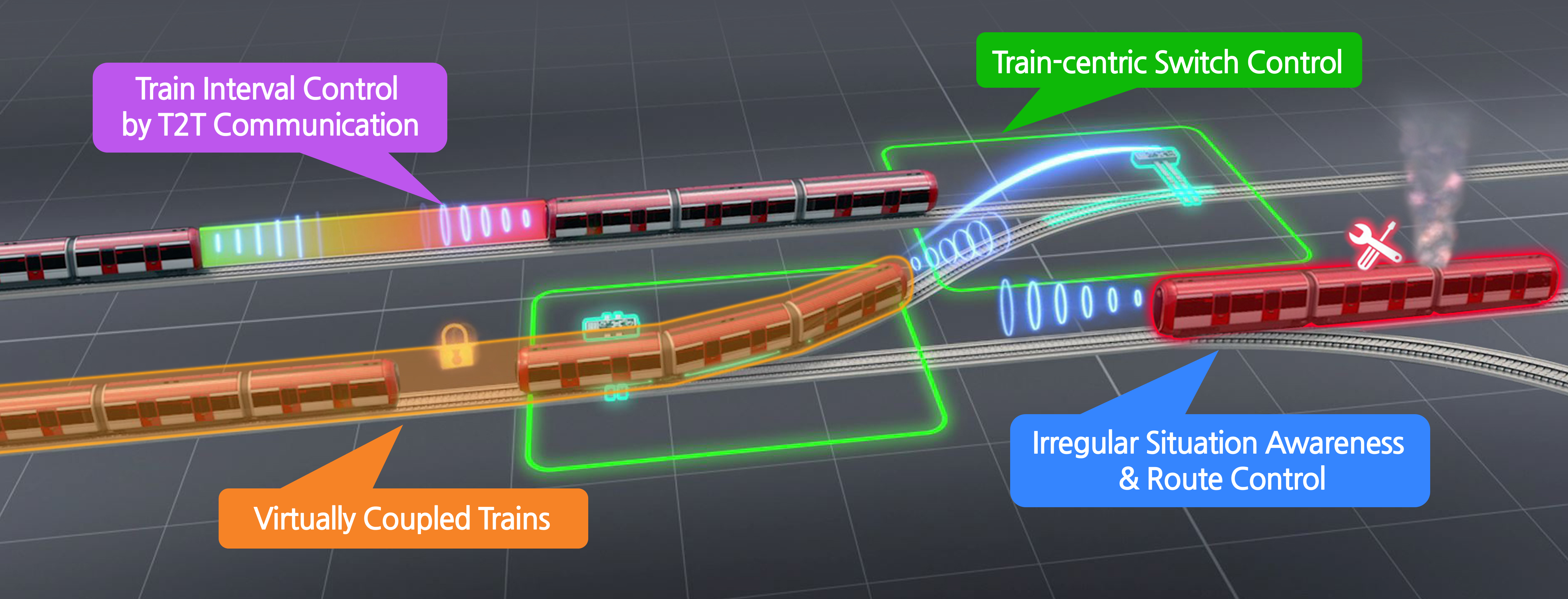
Fig. 2: Key features of ATCS.
B. Autonomous Train Control System
ATCS is a cooperative train control system based on train-to-train communication. Fig. 2 illustrates the key features of ATCS. In ATCS, trains determine their own safe movement distance by reflecting the driving status information of other trains. Since, furthermore, trains send control commands to point machines on their own routes, they directly control the point machines. When irregular and urgent situations occur, trains recognize these situations by themselves and take measures such as dynamic route control to ensure safety. In addition, trains operate coupling and decoupling processes on the move. As a result, these train-centric features of ATCS allow trains to run closer to the preceding train and make more efficient train operations. Fig. 3 shows the configuration of ATCS. There are an ATCS onboard control unit and wayside infrastructures, and they are connected with wireless communication. The onboard control unit consists of automatic train protection (ATP) and automatic train operation (ATO). ATP performs protection functions and guarantees safe train movement. For this purpose, it executes train localization, train speed monitoring, determination of movement authority (MA), management of static and dynamic speed profiles, track resource control, and calculation of various brake intervention curves. ATO executes automatic driving controls such as acceleration/deceleration of a train and opening/close of doors. In addition, it monitors and manages routes and schedules of trains related to train operation. The ATCS onboard control unit interfaces with train/track information database, sensors measuring the train position and speed (transponder reader, tachometer), and train subsystems such as traction/brake systems and train control and monitoring system. It also shares train driving status information with other trains. In wayside infrastructures, there is automatic train supervision (ATS) for initial scheduling and routing functions. Finally, to directly control the point machines and/or platform screen doors on the route, the object controller (OC) is introduced with a radio connection.
Figure 3 Configuration of ATCS.
C. Demonstration of ATCS
To verify the functions and performances, we made ATCS control unit prototypes. In the onboard equipment, ATP and ATO were implemented by using separate CPU boards with QNX® real-time operating system, as shown in Fig. 4(a). The developed software programs ran on QNX® applications, and the developed language was C++. We also made the OC and ATS prototypes by using industrial personal computers as shown in Fig. 5(a) and (b). OC was designed to interface with the ATCS onboard control unit via wireless communication and the wayside switchboard via wired lines.
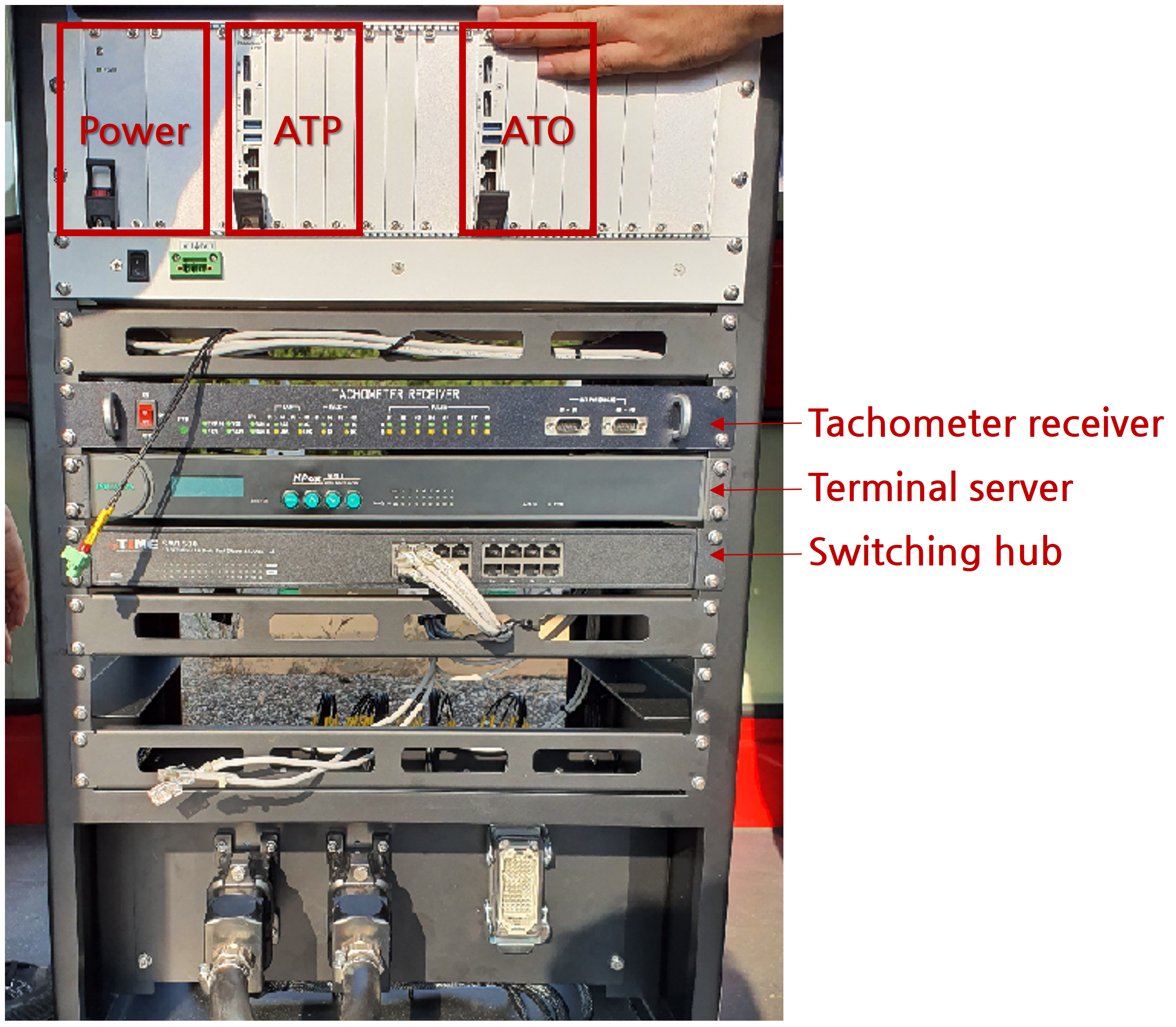
Fig. 4: ATCS onboard equipment.

Fig. 5: ATCS control units (a) object controller and (b) ATS.
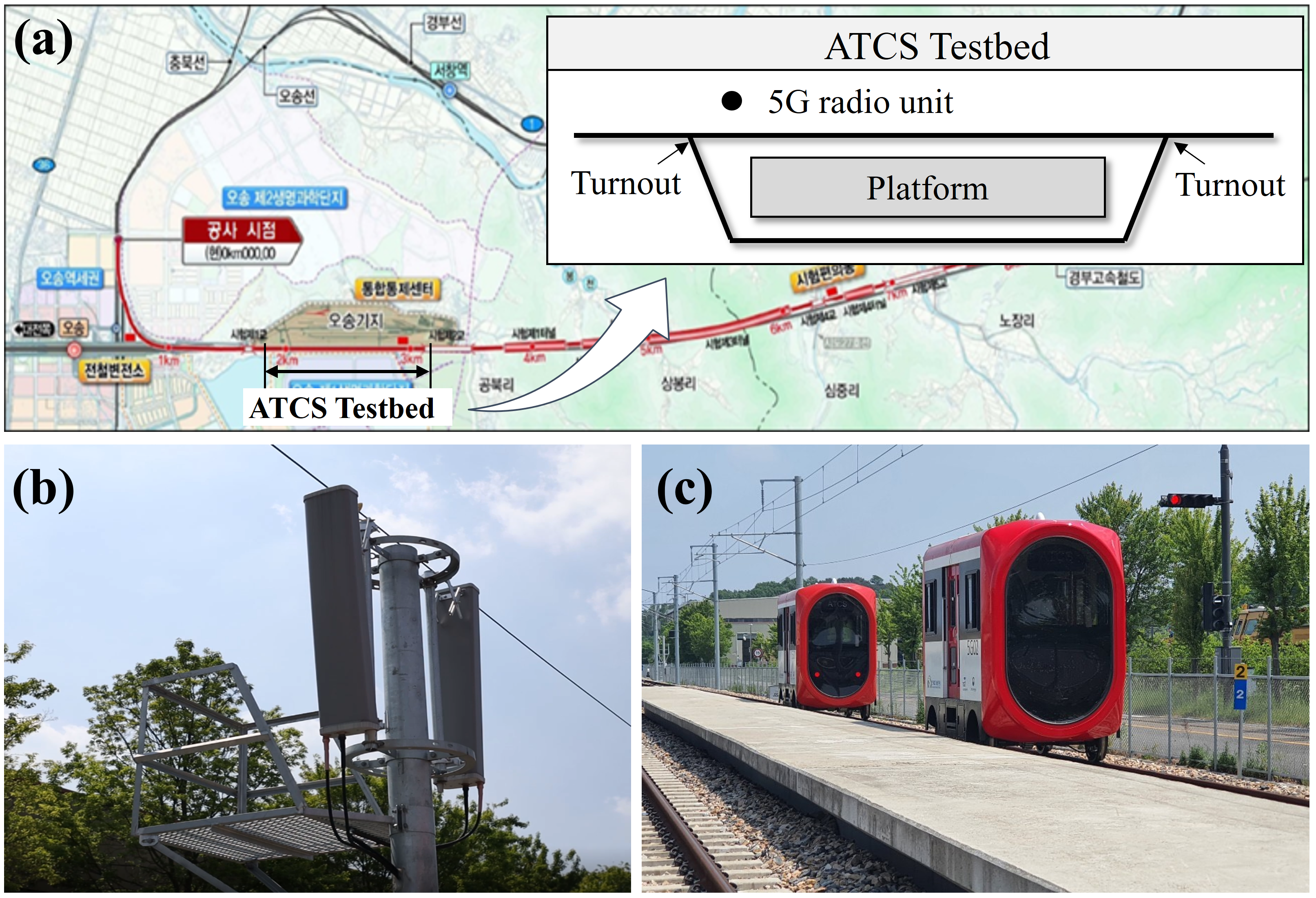
Fig. 6: (a) ATCS testbed, (b) 5G mobile communication infrastructure (radio unit), and (c) test vehicle.
The ATCS control unit prototypes were installed on the testbed with a length of 1.2 km of the Osong test track in South Korea, as shown in Fig. 6(a). This testbed consisted of two turnouts, one 200 m long island platform, and two turn-back points. In addition, to compensate for the train position errors, the transponders based on RFID (Radio Frequency IDentification) were installed in the testbed. For wireless communication, we deployed 5G mobile communication infrastructures (radio units) and confirmed to eliminate any shadow area as shown in Fig. 6(b). We also produced two test vehicles with the size of 4.270 m x 1.920 m x 3.000 m (length x width x height) and the gauge of 1.435 m as shown in Fig. 6(c). The drive method was based on electric motors with a capacity of 10 kW x 2. The maximum speed of the vehicle was designed to be 30 km/h. In the test vehicle, there were an upper-level controller (ATCS onboard control unit), a lower-level controller (acceleration and braking), and a man-machine interface.

Fig. 7: Test of train-centric interval control.
We evaluated the train-centric control function of ATCS in the field test. For this, we set two vehicles to be driving in the same direction and share driving information of the vehicles via 5G communication link. The following train maintained the appropriate safety distance from the preceding train as shown in Fig. 7.
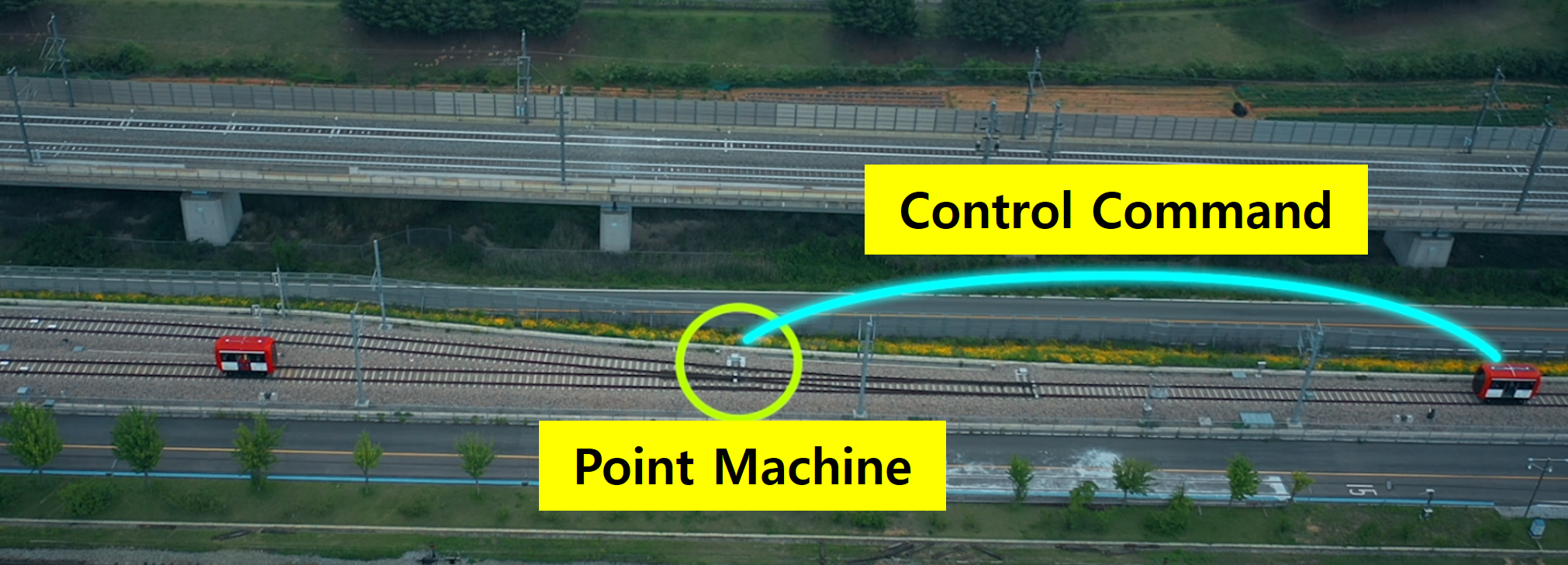
Fig. 8: Test of train-centric point machine control.
We also confirmed the train-centric point machine control function of ATCS. As shown in Fig. 8, each train directly controlled the point machine on its own route.
D. Conclusion
We have presented ATCS as the next-generation train control system beyond CBTC. ATCS guarantees safe train movement by cooperating with trains. In ATCS, trains not only determine their own MA by reflecting the driving status but also directly control the point machines on their own route. Due to these train-centric features, the minimum safety distance between consecutive trains in ATCS is smaller than that in CBTC. Thus, the train headway can be also shortened.
REFERENCES
1) S. Oh, K. Kim, and H. Choi, “Train interval control and train-centric distributed interlocking algorithm for autonomous train driving control system,” in Journal of the Korea Academia-Industrial cooperation Society, 2016, Vol. 17, No. 11, pp. 1–9.
2) “KRRI eyes smart trains from 2030,” in Railway Gazette International, February 2021, pp. 18–20.
Authors
 |
Hyeon Yeong Choi received a B.S. degree in electrical engineering from the University of Seoul, Seoul, South Korea, in 2003, and the M.S. and Ph.D. degrees in electrical engineering from Korea Advanced Institute of Science and Technology (KAIST), Daejeon, South Korea, in 2005 and 2010, respectively. From 2011 to 2013, she was a research engineer at KDDI R&D Laboratories Inc., Japan, where she was engaged in research and development of photonic transport networks and future optical networks. She is currently with Korea Railroad Research Institute (KRRI), South Korea. Her research interests include integrated networks for railways and intelligent train control systems. |
 |
Rag-Gyo Jeong received his B.S., M.S., and Ph.D. degrees, all in Electrical Engineering, from Inha University, Incheon, Korea, in 1991, 1999, and 2005, respectively. He joined KRRI (Korea Railroad Research Institute), Uiwang, South Korea, as a Senior Researcher in 1995. Currently, he is a Chief Researcher and General Director of Smart Electrical & Signaling Division at KRRI. From 1990 to 1994, he was a Staff Engineer at Hanjin Heavy Industries Co., Ltd. His research interests include autonomous train control systems, electric-powered transportation systems, PRT(Personal Rapid Transit), and system engineering. |
About the Newsletter
Editors-in-Chief

Jin-Woo Ahn
Co-Editor-in-Chief

Sheldon Williamson
Co-Editor-in-Chief
TEC Call for Articles 2023 - Advances in Charging Systems
The TEC eNewsletter is now being indexed by Google Scholar and peer-reviewed articles are being submitted to IEEE Xplore.
To submit an article click here.