

Catenary Free Battery Electric Operation with Opportunity Charging for Light Rail Networks
Athanasios Iraklis, Christos Iraklis, Andreas Hoffrichter
Abstract- Rail vehicles function as the most efficient and the least polluting means of human and goods transportation on land. Consequently, efforts have to be made towards affordable low-cost expansion of rail networks as one of the most promising solutions for low carbon mobility. The 4Cs (Carbon, Cost, Capacity, Customer) set as goals for railways by the UK Department of Transport require new advanced ways of propulsion; the transfer of expertise and knowledge from other sectors can aid the achievement of these goals. Wayside electrification networks suffer from high installation and maintenance costs, and rail operators struggle with meeting stricter than ever emission regulations, both requiring new forms of advanced propulsion to address these problems. This article discusses the concept of battery electric traction with grid-based or stationary battery bank-based opportunity charging for catenary free operation, as a promising solution for low-cost and emission-free expansion of rail networks, especially for light rail vehicle (LRV) operation.
Index Terms- Catenary Free Operation, Battery Electric, Energy Storage, Opportunity Charging Light Rail Network
I. Introduction
Wayside electric systems are the most efficient means for propulsion in railways. However, due to high installation and maintenance costs of overheard infrastructure, third and fourth rails, not all lines in rail networks are electrified. Additionally, as the power demands for rolling stock and the number of operating rail vehicles increases, electrical supply networks for rail vehicles have to meet extreme working conditions, including high power losses and line voltage drops. Therefore, new developments and advanced concepts that allow technical and economic feasibility of electric rail network expansion are required, while key strategic points as the 4Cs set by the UK Department of Transport [1] need to be satisfied simultaneously. Railway operators that still use diesel fuel as the primary energy source will have to focus soon on alternative solutions due to stricter emission regulations [2]. Emission legislation for non-road applications, especially the Non-Road Mobile Machinery Directive in the EU (Stages) and the Exhaust Emission Standards in the US (Tiers), along with fuel taxation policies and the increasing demand for low-noise operation will soon push rail operators into alternative fully-electric propulsion systems.
With the increasing performance and the reducing costs of electrochemical energy storage devices, battery-electric configurations with charging points at certain stops or terminals offer a solution for electric propulsion. They can make use of electric traction while avoiding the high costs of continuous wayside electrification, being especially attractive where the installation of conventional electrification infrastructure is considered to be technically and economically unfeasible [3]. Furthermore, compared to diesel units, which are used for non-electrified sections, battery-powered vehicles can provide emission-free operation and eliminate the uncertainty of the fuel supply and the increasing costs of diesel fuel. Apart from emission-free (local) operation due to the use of electrochemical energy storage, by recovering the vehicle’s kinetic energy during braking phases total system efficiency can be boosted and, as less energy is required for battery charging, fewer greenhouse gas emissions (global) are produced per year compared to diesel trains. Also, the operators of routes without overhead catenary, third or fourth rails, can reduce cost associated with wayside electrification, particularly when installation becomes complicated and expensive, such as in tunnels, on bridges, and junctions [4]. An additional advantage is the avoidance of visual impact from post and overhead cables and other associated components of electrification infrastructure, which is especially desirable in locations where historical character should be preserved.
II. Batteries in Light Rail Vehicle (LRV) Networks
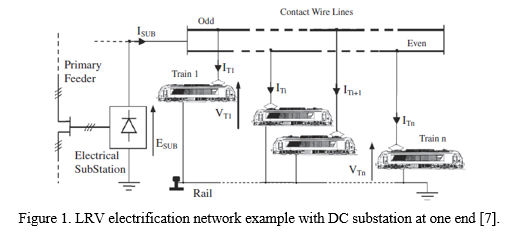
In a typical LRV electrical network, there are DC electrical substations at one or both ends of the line. Those are supplied from the grid with medium voltage AC that is rectified to a suitable DC voltage for feeding the contact lines. In Europe, the wayside, DC electrical substations that provide power for electric traction are typically supplied by AC from the utility at 11 kV or 33 kV for LRVs [5]. This incoming medium AC voltage, at grid distribution level, is then transformed and rectified, before DC (typically 600V, 750V or 1500V) voltage is supplied to the catenary, third or fourth rail. For short distances and few vehicles running simultaneously on the line, the configuration uses only one substation at one end, whereas two substations, one at each end, are used for long lines and many vehicles [6]. An example with a single DC substation at one end of an LRV line is given in Figure 1.
If overhead catenary, third, or fourth rail, are eliminated, those electrical substations can be used as charging points for battery-electric vehicles, which can also store energy that is recovered during braking from the kinetic energy enabling maximum possible utilization of batteries. Electrochemical storage still lacks popularity due range restrictions resulting from energy storage limitations but charging schemes using pantograph systems at terminals have the potential to alleviate range anxiety while, additionally, enabling a decrease in battery sizes [8]. Also, the connection for charging only happens at terminals and when the vehicle is stopped, which eliminates technical difficulties with pantograph-catenary or shoe-rail dynamic connections. Optimized trajectory controls combined with regenerative braking are receiving increased attention to minimize total system energy consumption, and several rail operators have implemented strategies to enhance driving style and maximise regenerative braking in order improve their systems’ efficiency.
In current LRV networks, braking energy can be captured and returned to wayside electrification infrastructure for consumption by other vehicles that are relatively close as long as their operating phases coincide, for example, braking of one vehicle while another accelerates or is in a cruising phase [9]. However, if vehicles are too far apart or the operating phases do not coincide the regenerated energy is typically converted to heat in resistor banks due to technical limitations in substations that prevent the return of power to the grid, thus, in many cases, utilization of regenerative braking and total system efficiency cannot be maximized. In the case of battery-driven railcars, recent developments in high power density chemistries, such as Lithium Titanate Oxide (LTO) and Nano-Nickel Manganese Cobalt Oxide (Nano-NMC), and efficient fast-charging schemes indicate great potential for battery-powered LRVs, especially on routes with comparatively low-density services, where optimized charging times do not severely affect timetables, as high charging currents can be applied at terminals. Existing solutions with energy storage devices developed by Alstom, Bombardier, CAF and Siemens [10] have already demonstrated the feasibility of partial or full elimination of overhead contact systems (OCS) for LRV networks. Apart from regenerative braking energy utilization and partial or full elimination of installation and maintenance costs for electrification, those systems have also presented other advantages like preservation of aesthetics, increased safety for people, and especially for urban and suburban areas, prevention of access problems for certain vehicles and conflicts with vegetation.
A solution to fully eliminate continuous wayside electrification while enabling emission-free operation (local) with battery-driven LRVs is called opportunity charging [11]. The technique is based on fast energy transfer at terminals where either (1) a high power charger connects the vehicle’s powertrain DC-bus and the substation, or (2) a high power charger connects the vehicle’s powertrain DC-bus to a stationary battery bank, which is charged from the DC substation at low charging rates during times when no vehicle is requesting charge. This battery bank then releases the energy at higher discharging rates when a vehicle stops and a charging command is sent. Compared to the on-board battery pack, the stationary energy bank can be of different chemistry depending on power, lifetime, and timetable requirements. As the driving style of an LRV can be known a priori, the whole system can be simulated and optimized in terms of cost, performance, and lifetime. The system then allows complete operation without continuous wayside electrification and all the available regenerative braking energy is stored on the vehicle for future acceleration phases.
In this concept, the operation of the LRV starts from standstill at a terminal A. The on-board battery pack is already charged up to a certain state-of-charge (SoC) limit defined for low internal resistance and optimal lifetime purposes. The vehicle then accelerates, cruises and travels until terminal B is reached. During that process, the vehicle’s traction and auxiliary units are powered by the on-board battery pack. Before the vehicle reaches the second terminal (B) regenerative braking charges the battery pack and a percentage of the vehicle’s kinetic energy is stored as chemical energy. The speed profile can be optimized a priori so that, based on the vehicle’s powertrain characteristics, energy consumption is minimized with respect to required running times. When a DC/DC converter is utilized between the on-board battery pack and the DC-bus, it can be controlled in a way so that traction power is limited and the vehicle is driven in the most energy efficient manner, depending on SoC, expected load profile and auxiliary energy demands [12].
If a charging point is selected for terminal B, a charging command can be sent when the vehicle stops. The substation’s charger will then provide energy to the powertrain’s DC-bus so that the on-board battery pack is charged to the desired SoC. During that time, the auxiliary units (hotel and ancillary loads) are also powered from the charger. If terminal B does not represent a charging point, the SoC of the on-board battery pack will continue reducing until the vehicle returns back to terminal A. The on-board battery pack can be sized depending on which scheme is used. Additionally, the powertrain’s vehicle supervisory controller (VSC) can be programmed to manage the energy consumption of auxiliary loads, prevent irregular energy consumption, and assist the driver to remain close to the target speed profile, which can be updated in real-time based on prediction of vehicle operation states.
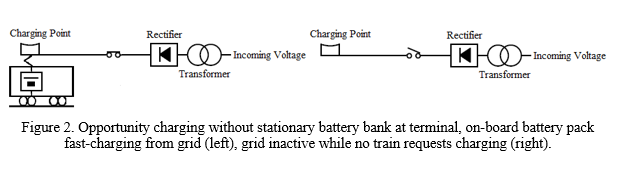
At terminals, charging facilities are installed and the electric power is supplied when an LRV stops. The aforementioned facilities provide power to the battery system of the electric train from another energy storage system charged by the grid or the grid itself. Therefore, the function of the charging facilities is similar and equivalent to the function of substations in DC electrified routes. If charging directly from the grid is used, high power is supplied from a charger (DC/DC converter) after voltage is converted from AC to DC. The current has to be high so that the on-board battery pack can be charged rapidly during the short stop time. However, high current flow through wires and connections results in high power losses and subsequently decreased efficiency. Also, the components of the charging station have to be carefully chosen to withstand the high currents and the voltage range. Therefore, construction of grid-based charging facilities is complex, leading to increased construction and operation cost [13]; charging-from-the-grid scheme is presented in Figure 2.
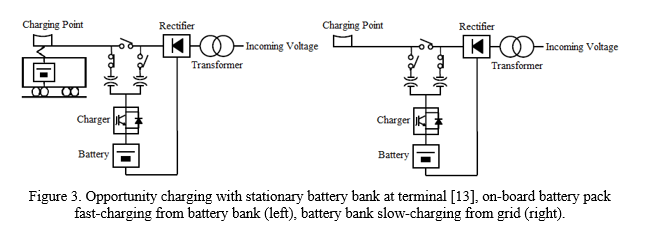
Taking into account the aforementioned complexities of a grid-based charging substation, there is a need for an alternative, more cost-effective solution - the installation of stationary energy storage systems. In such an arrangement, the stationary battery bank system is charged when all trains are absent. When a train arrives, its on-board battery pack is charged from the stationary storage battery, which is installed in the charging facilities. This arrangement allows charging of the off-board battery pack at low power rates, which is beneficial for both the grid and the battery pack. Moreover, it is also possible to combine renewable energy systems with the stationary battery storage facilities: photovoltaic and wind power generation systems could be integrated with battery charging stations, using energy management control devices to increase the overall efficiency and reliability of the system [14].
A battery-based charging facility comprises the supply circuit, rectifying circuit, and a battery storage circuit (including a DC/DC converter/DC battery charger). The rectifier should be able to work with high or medium DC voltage. However, the rectifier and DC charger could be replaced by a half- or a full-bridge AC/DC inverter, which can be controlled to act as a charger for the stationary battery bank. Key parameters to consider when developing and designing such systems are the capacity of the battery storage system, the method of controlling charging and discharging currents, and the specification of the devices based on maximum power output/input rates. Figure 3, illustrates a stationary battery-based charging facility.
Nowadays, increased computing capabilities and user-friendly software platforms in railways provide the benefit of designing and optimizing a system prior to testing, demonstration, and final production for a certain application. Simulation models and designing algorithms are increasing in importance for rail engineering companies and operators, as significant cost and time savings can be realised through avoidance of oversized components, on-site manual tuning of system controls, increased energy consumption, and re-scheduling of timetables. Especially for catenary-free battery-electric LRVs, vehicle performance simulation models and optimization processes can assist in speed profile determination , selection of appropriate component sizes and charging rates to optimize energy consumption, system cost, and timetables [15]. Simulation and optimization capabilities can help operators to make decisions when developing battery-based LRV systems.
IV. Conclusion
New, advanced power systems for rail propulsion are required for sustainable expansion of railway networks worldwide. Battery-electric configurations combined with wayside stationary energy storage banks represent one of the most promising solutions for zero-emission and catenary-free operation. These arrangements offer potential to maximise total system efficiency and low-noise operation due to the absence of combustion processes. Such a system can be compact, modular, and is relatively easy to optimize, install, control, and maintain. Fast-charging schemes with opportunity charging from the grid or stationary battery banks at terminals could help operators towards the expansion of their rail networks, especially for light rail vehicle (LRV) operation.
New high power density and long lifetime battery chemistries with great thermal stability such as LTO and Nano-NMC cells, provide an alternative to incumbent technologies used in LRV systems where service frequency is low, distances are relatively short, and the number of vehicles is few. Stationary battery banks enable utilization of low-cost, low power rated DC electrical substations that are supplied by medium or nearby home utility low voltage lines as fast-charging of battery packs on-board vehicles is decoupled from grid supply, which is in contrast to charging arrangements that are directly connected to the grid, where complex and relatively expensive components are required. Especially for new, advanced very light rail (VLR) [16] networks, the solution discussed in this article offers great potential for development and further expansion at low installation and maintenance costs.
References
[1] Department for Transport, Delivering a sustainable railway: white paper CM 7176, 2007.
[2] Pagenkopf, J., & Kaimer, S. (2014, March). Potentials of alternative propulsion systems for railway vehicles—A techno-economic evaluation. In Ecological Vehicles and Renewable Energies (EVER), 2014 Ninth International Conference on (pp. 1-8). IEEE.
[3] Ghaviha, N., Bohlin, M., & Dahlquist, E. (2016). Speed profile optimization of an electric train with on-board energy storage and continuous tractive effort. In International Symposium on Power Electronics, Electrical Drives, Automation and Motion, Speedam 2016, June 22-24, 2016-Anacapri, Capri Island-Italy.
[4] Rufer, A. (2010). Energy storage for railway systems, energy recovery and vehicle autonomy in Europe. In The 2010 International Power Electronics Conference-ECCE ASIA-.
[5] Chymera, M., & Goodman, C. J. (2012, November). Overview of electric railway systems and the calculation of train performance. In IET Conference Proceedings. The Institution of Engineering & Technology.
[6] Iannuzzi, D., Pagano, E., & Tricoli, P. (2013). The use of energy storage systems for supporting the voltage needs of urban and suburban railway contact lines. Energies, 6(4), 1802-1820.
[7] Iannuzzi, D., Ciccarelli, F., & Lauria, D. (2012). Stationary ultracapacitors storage device for improving energy saving and voltage profile of light transportation networks. Transportation Research Part C: Emerging Technologies, 21(1), 321-337.
[8] Navidi, T., Cao, Y., & Krein, P. T. (2016, February). Analysis of wireless and catenary power transfer systems for electric vehicle range extension on rural highways. In 2016 IEEE Power and Energy Conference at Illinois (PECI) (pp. 1-6). IEEE.
[9] Ciccarelli, F., Del Pizzo, A., & Iannuzzi, D. (2014). Improvement of energy efficiency in light railway vehicles based on power management control of wayside lithium-ion capacitor storage. IEEE Transactions on Power Electronics, 29(1), 275-286.
[10] Novales, M. (2011). Light Rail Systems Free of Overhead Wires. Transportation Research Record: Journal of the Transportation Research Board, (2219), 30-37.
[11] Al-Ezee, H., Tennakoon, S. B., Taylor, I., & Scheidecker, D. (2015, September). Aspects of catenary free operation of DC traction systems. In Power Engineering Conference (UPEC), 2015 50th International Universities (pp. 1-5). IEEE.
[12] Ciccarelli, F., & Lauria, D. (2010, June). Sliding-mode control of bidirectional dc-dc converter for supercapacitor energy storage applications. In SPEEDAM 2010 (pp. 1119-1122). IEEE.
[13] Masatsuki, I. (2010, June). Development of the battery charging system for the new hybrid train that combines feeder line and the storage battery. In Power Electronics Conference (IPEC), 2010 International (pp. 3128-3135). IEEE.
[14] Moradi, M. H., Abedini, M., Tousi, S. R., & Hosseinian, S. M. (2015). Optimal siting and sizing of renewable energy sources and charging stations simultaneously based on Differential Evolution algorithm. International Journal of Electrical Power & Energy Systems, 73, 1015-1024.
[15] Miyatake, M., & Haga, H. (2010, October). Optimization of speed profile and quick charging of a catenary free train with on-board energy storage. In Electrical Systems for Aircraft, Railway and Ship Propulsion (pp. 1-6). IEEE.
[16] Winnett, J., Hoffrichter, A., Iraklis, A., McGordon, A., Hughes, D. J., Ridler, T., & Mallinson, N. (2016, October). Development of a very light rail vehicle. In Proceedings of the Institution of Civil Engineers: Transport. ICE Publishing.
Authors:
 |
Athanasios Iraklis was born in Thessaloniki, Greece, on the 27thof May, 1989. He received his MSc degree in Electrical and Computer Engineering from the Aristotle University of Thessaloniki in 2015. He is currently a Research Engineer within the Energy and Electrical Systems group at Warwick Manufacturing Group, University of Warwick, UK. His research interests lie in the modelling and simulation, design and energy management control of hybrid rail propulsion and wayside energy storage systems. |
 |
Christos Iraklis was born in Thessaloniki, Greece, on the 27th of May, 1989. He received his MSc degree in Electrical and Computer Engineering from the Aristotle University of Thessaloniki in 2014. He is currently a Research Assistant within the Energy and Electrical Systems group at Warwick Manufacturing Group, University of Warwick, UK. His research interests lie in the field of battery energy storage systems for stationary and automotive applications, battery cell testing and characterization as well as integration of batteries with renewable energy technologies. |
 |
Andreas Hoffrichter received his PhD from the School of Electronic, Electrical and Computer Engineering at the University of Birmingham, in 2013. After completion of his PhD, he was employed as a Teaching and Research Fellow in the Birmingham Centre for Railway Research and Education at the university, where he taught on the railway master courses and developed new modules. In 2014, Andreas moved to the Warwick Manufacturing Group within the University of Warwick, England, were he led the research activity related to drive systems for railway vehicles, including energy storage hybrids and hydrogen fuel cell systems. His research concentrated on railway traction, conceptual drive-system development, and subsequent vehicle performance evaluation. In spring 2016, he joined Michigan State University to lead the railway education and research activities. He is now the Burkhardt Professor in Railway Management within the Department of Supply Chain Management, Broad College of Business, at Michigan State University. He is the Executive Director of Railway Management Programs and leads the railway research activities. |
About the Newsletter
Editors-in-Chief

Jin-Woo Ahn
Co-Editor-in-Chief

Sheldon Williamson
Co-Editor-in-Chief
TEC Call for Articles 2023 - Advances in Charging Systems
The TEC eNewsletter is now being indexed by Google Scholar and peer-reviewed articles are being submitted to IEEE Xplore.
To submit an article click here.