

Electric Vehicle Systems Design Using Connected X-in-the-Loop Environments
Introduction
The architecture of modern electric vehicles (EV) with individual on-board and in-wheel motors allows enabling new motion control technologies. Electric motors as highly dynamic actuators can be used for braking, stability, handling and ride control to support operation of traditional active chassis systems as ABS, ESP, torque vectoring et al. This leads to integrated EV dynamics control systems that is beneficial not only for safety and comfort but also for fail-safe operation and redundancy. However, as a result, complex on-board and embedded systems are emerging, which require sophisticated software components and comprehensive validation and testing procedures.
Whereas the functional validation of integrated EV systems using software-in-the-loop (SIL) and model-in-the-loop (MIL) approaches is well established now, advanced real-time (RT) testing on hardware-in-the-loop (HIL) platforms and component test rigs has some challenges. In this case, the EV systems from different physical domains should be integrated into the joint testing environment. Nevertheless, it is rarely possible to establish all required test setups even within one OEM or supplier facility. An efficient solution in this regard can be the organization of networked x-in-the-loop (XIL) environments, where test setups and testing objects are located in different geographical hosts and remotely interconnected with the possibility to share experimental data in real-time.
One of the first examples of remote XIL experiments has been reported in [1], where engine-in-the-loop and driver-in-the-loop test setups were connected through the Internet between the University of Michigan (Ann Arbor, MI, USA) and TARDEC (Warren, MI, USA). Continuous improvement of Internet performance stimulated recently further investigations on this topic. The work [2] reported an application example of co-simulation for the connection of scaled testbed (Graz, Austria) and RT driving simulation environment (Renningen, Germany) for validation of ADAS functions. A variant of intercontinental distributed XIL architecture between Tongji University (China) and Karlsruhe Institute of Technology (Germany) is demonstrated in [3] for designing the powertrain of fuel cell EV. However, most of the relevant published studies consider a limited number of connected devices and propose use cases without robust compensation of negative influence from network delays and data losses. All these aspects have motivated the development of an advanced complex x-in-the-loop architecture, named XILforEV and proposed in collaboration between Audi, DRiV (Tenneco), Elaphe, ITAINNOVA, Siemens PLM and Technical University of Ilmenau with support of Arrival. Its components are explained in the next sections.
XILforEV architecture
The proposed architecture has been originated from the following set of requirements:
- Purpose – provide an experimental environment for simultaneous RT validation and testing of EV powertrain and chassis systems using connected facilities distributed between different geographical locations;
- Functionality – use for development design of EV control systems, studies on the fail-safe operation, and investigations on synergetic effects from the integrated operation of EV systems;
- Networking – consider variants of distributed local (test setups are located in the same host and can be connected by a local network) and distributed remote (test setups are located in different geographical hosts and connected by Internet);
- Global modeling – use of one global server-based or cloud-based RT vehicle model for all networked testing facilities;
- Open interface – allow the inclusion of any required new test setups into the architecture with the access for external users.
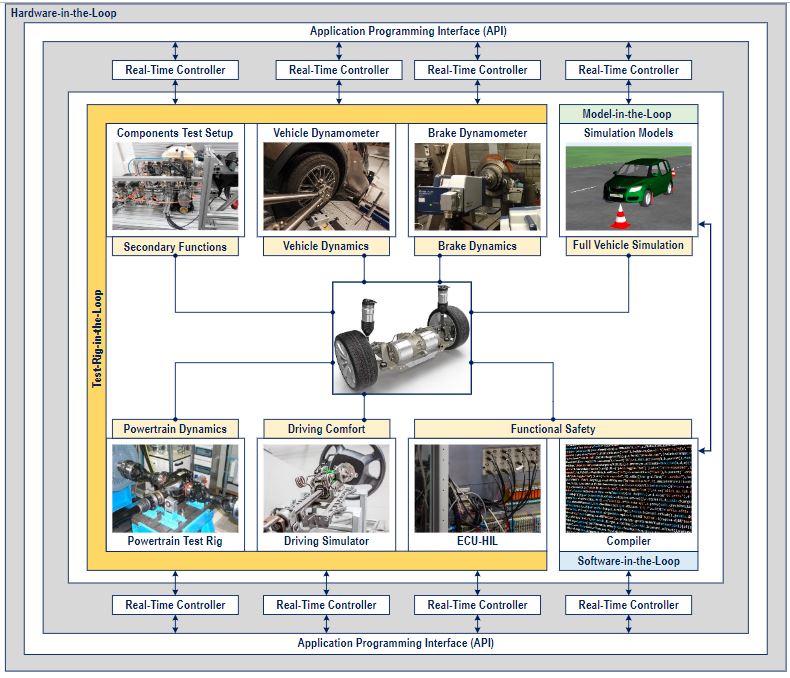
Fig. 1: A variant of distributed and shared architecture for EV systems design
The actual variant of resulting architecture is shown in Fig. 1. It can be seen that it unites traditional validation and testing tools as SIL, MIL and HIL advanced with the test-rig-in-the-loop approach. Each component is supplemented with real-time controllers communicated with the application programming interface. The architecture includes a full EV model running on a global server. In this model, the subsystem and controllers are interacting as Functional Mock-Up Units with a co-simulation strategy based on the Functional Mock-up Interface. The communication is relying on the User Datagram Protocol (UDP) ensuring compatibility with the test rig hardware based on IP/Ethernet. This decision has been taken on the basis of previous studies confirming the applicability of UDP also for intercontinental XIL tests [4].
As can be seen from Fig. 1, the presented configuration includes a variety of test setups, which are usually being used for one or another EV design tasks. To give a look inside how the XILforEV architecture can be used in practice, the next section will introduce several relevant use cases.
Use Cases
Several relevant EV design tasks can be considered within the framework of XILforEV architecture. The selected use cases cover the development of brake blending, ride blending and integrated EV chassis control and are summarized in Table 1.
Table 1: Components of XILforEV architecture for use cases
|
EV hardware |
XIL configuration |
Test setups |
Software part |
|
Use Case “Brake Blending”, Fig. 2 |
|||
|
Electro-hydraulic brakes, in-wheel motor |
Distributed local (all test setups are located in Ilmenau, Germany) |
Brake dynamometer; Brake HIL test rig; Powertrain test rig |
Full RT vehicle model; Co-simulation interface |
|
Use Case “Ride Blending”, Fig. 3 |
|||
|
Active suspension |
Distributed remote (test setups are located in Zaragoza and Ermua, Spain) |
Suspension component test bench; Driving simulator |
RT models of vehicle, powertrain and tire/road |
|
Use Case “Integrated Chassis Control”, Fig. 4 |
|||
|
Electro-hydraulic brakes, in-wheel motor, active suspension |
Distributed remote (test setups are located in Zaragoza and Ermua, Spain, and in Ilmenau, Germany) |
Suspension component test bench; Driving simulator; Brake HIL test rig; Powertrain test rig |
RT models of vehicle and tire/road; Co-simulation interface |
In the case of brake blending design the XILforEV architecture can be used to design corresponding controller optimized by criteria of braking performance, energy efficiency and driver comfort. The proposed configuration allows to receive in real-time the information about important operational parameters of in-wheel motor and friction brakes and to use them for the on-line controller tuning and optimization.
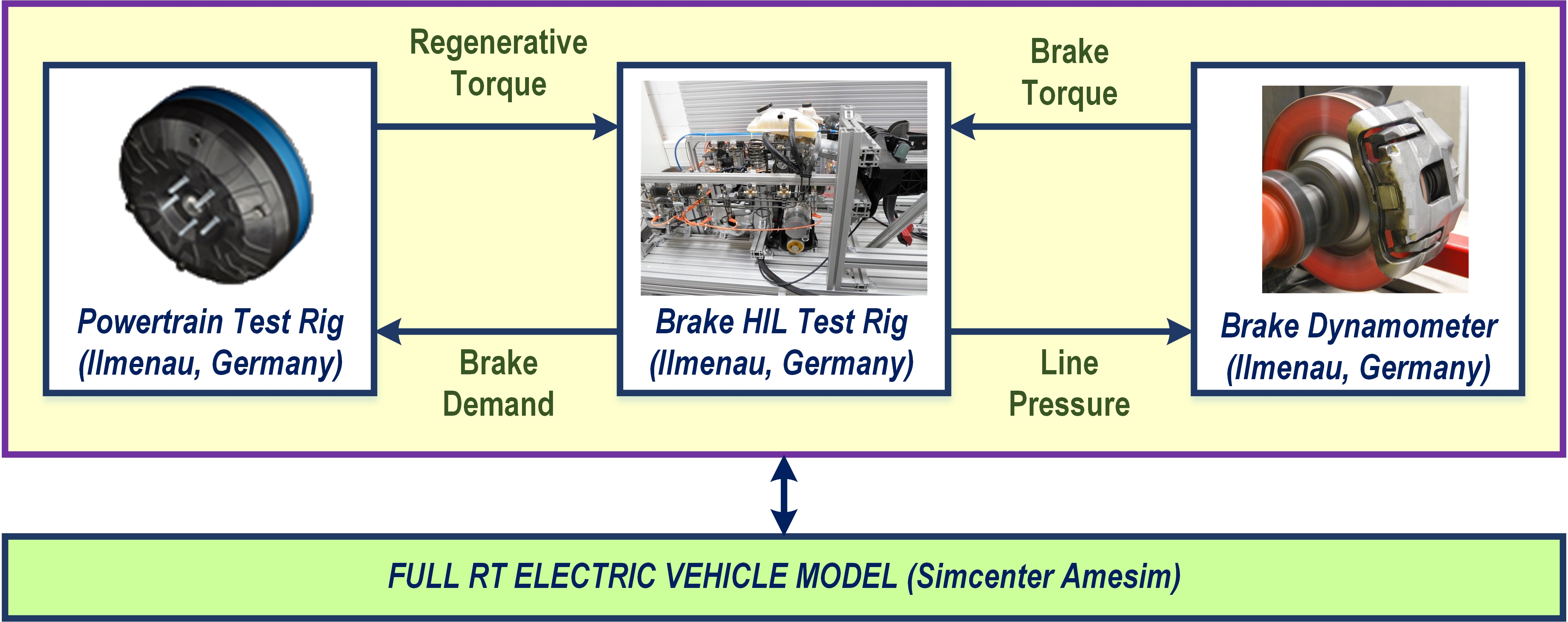
Fig. 2: XIL configuration for brake blending design
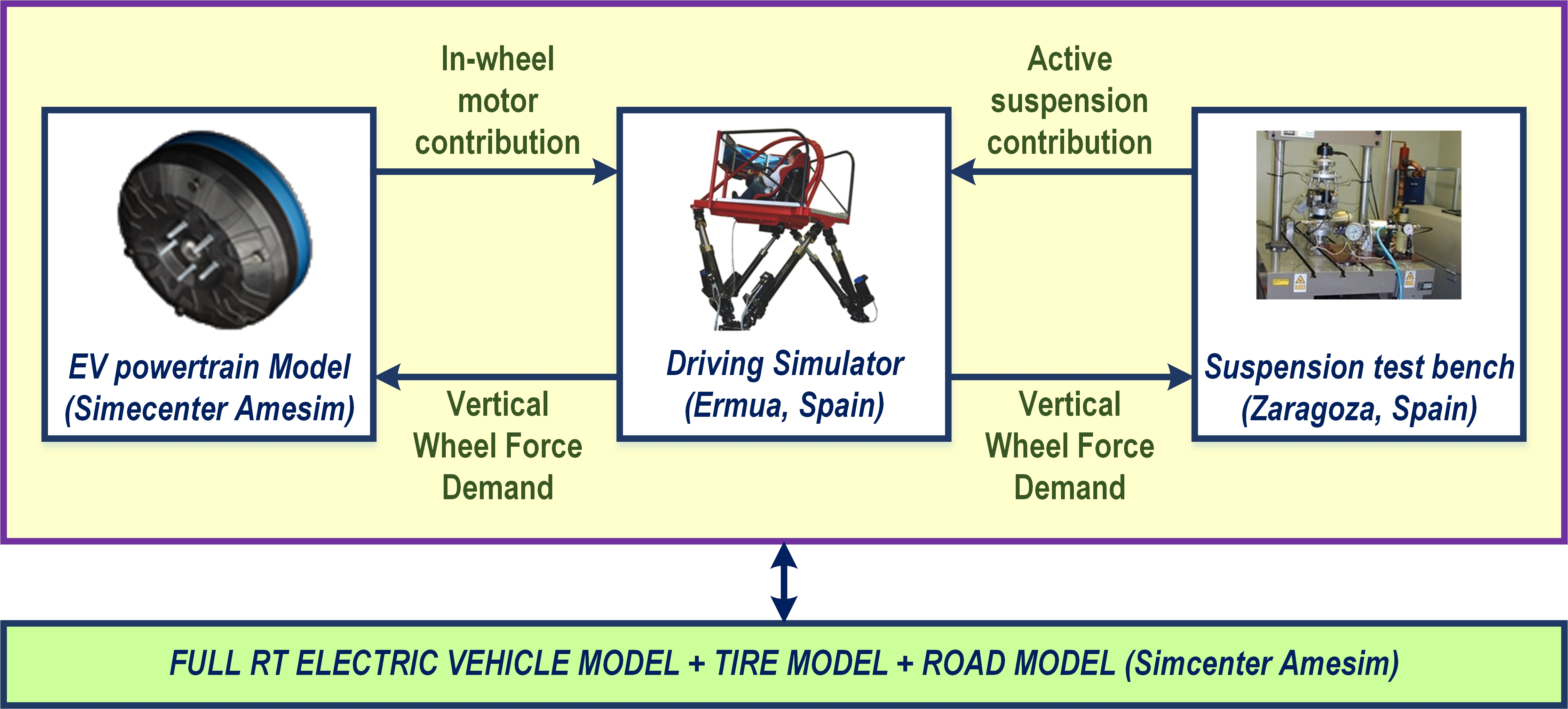
Fig. 3: XIL configuration for ride blending design
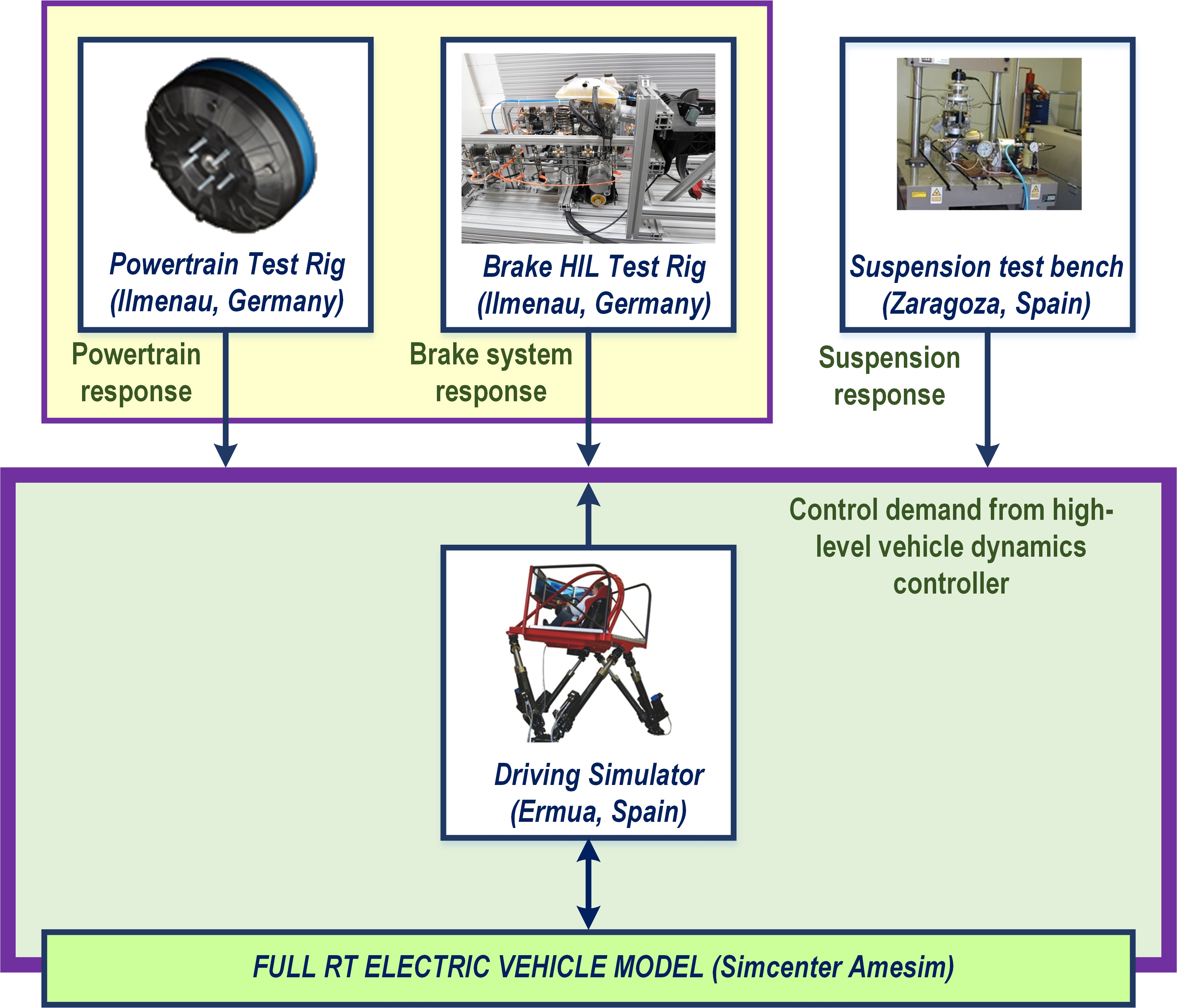
Fig. 4: XIL configuration for integrated EV chassis control design
Ride blending as joint control on the vertical EV motion dynamics both through individual electric motors and the active suspension is another complex design task. For this case, the XILforEV architecture makes possible to receive in real-time the dynamic parameters of suspension actuators for the studies on EV driving comfort with the driving simulator.
The combination of brake blending and ride blending control from the previous use cases gives the basis for the next use case dedicated to the integrated EV chassis control design. Here the powertrain, brake, and suspension test rigs are connected together to provide real-time actuator dynamics of participating EV subsystems. It allows optimizing the integrated EV chassis controller and investigating its influence on the safety and comfort of the driving simulator.
It should be noted that the XILforEV application is not limited by the introduced use cases and can cover many other design tasks, also by including additional testing environments.
Summary
The presented approach to the distributed experiments for validation and testing can contribute to the cost- and time-efficient design of EV systems. It enables also several technological and business cases as shared experimental environments and real-time simulation cloud with open plug-in interface for connected hardware setups. Beyond automotive, this technology could be also applicable to other transportation electrification domains, like aerospace (future distributed propulsion aircraft), rail or marine.
Acknowledgments
This project has received funding from the European Union’s Horizon 2020 research and innovation programme under grant agreement No 824333.
References
1. T. Ersal, M. Brudnak, A. Salvi, J. L. Stein, Z. Filipi, and H. K. Fathy, “Development of an Internet-distributed Hardware-in-the-loop Simulation Platform for an Automotive Application,” in Proc. ASME Dyn. Syst. Control Conf., 2009, pp. 73-80.
2. P. Baumann, M. Krammer, M. Driussi, L. Mikelsons, J. Zehetner, W. Mair, and S. Schramm, “Using the Distributed Co-Simulation Protocol for a Mixed Real-Virtual Prototype,” 2019 IEEE International Conference on Mechatronics (ICM), Ilmenau, Germany, 2019, pp. 440-445.
3. W. Niu, K. Song, Q. Xiao, M. Behrendt, A. Albers, and T. Zhang, “Transparency of a Geographically Distributed Test Platform for Fuel Cell Electric Vehicle Powertrain Systems Based on X-in-the-Loop Approach,” Energies, 2018, vol. 11, no. 9, p. 2411.
4. V. Schreiber, V. Ivanov, K. Augsburg, M. Noack, B. Shyrokau, C. Sandu, and P.S. Els, “Shared and Distributed X-in-the-Loop Tests for Automotive Systems: Feasibility Study,” IEEE Access, vol. 6, 2018, pp. 4017-4026.
Author
 |
Valentin Ivanov received the Ph.D. degree in 1997 and the D.Sc. degree in 2006 in Automotive Engineering from Belarusian National Technical University in Minsk, where he worked successively as Assistant, Associate and Full Professor. His research interests include automotive control systems, vehicle dynamics, electric vehicles, automated driving technologies, and automotive mechatronics. He is an SAE Fellow, IEEE Senior member and also a member of the Society of Automotive Engineers of Japan, and the International Society for Terrain-Vehicle Systems. |
About the Newsletter
Editors-in-Chief

Jin-Woo Ahn
Co-Editor-in-Chief

Sheldon Williamson
Co-Editor-in-Chief
TEC Call for Articles 2023 - Advances in Charging Systems
The TEC eNewsletter is now being indexed by Google Scholar and peer-reviewed articles are being submitted to IEEE Xplore.
To submit an article click here.