

Electric-Powered, Remote-Control Surveillance: FREEDOM, the Synergy Between Land and Air
By, Roberto Grassi , Pierluigi Rea, Paolo Maggiore, Erika Ottaviano
1. Introduction
The development of mobile security devices is becoming increasingly popular in a number of commercial and research institutions. More specifically, remote-controlled ground (or flying) vehicles have become attractive for missions where human presence is dangerous or difficult [1-4]. However, the integration between these two types of systems has not been yet proposed and it represents a challenging task. In order to design a ground/aerial system, several considerations should be addressed.
Referring to the ground module, an appropriate form of locomotion should be selected in order to achieve proper requirements of stability, flexibility, and maneuverability, while being easily controllable and low cost. Mobile robots are generally classified according to the type of locomotion they perform as wheeled, tracked, legged, or hybrid solutions [5]. Hybrid systems can be a good solution to exploit the terrain adaptability of legs in rough terrain and with simpler control, as well as high speed related with wheels. A good example is the Packbot [13], which was developed and commercialized by IRobot, USA, for Search and Rescue (SAR) application. It was successfully used to investigate the damaged Fukushima Nuclear plant after the 2011 Tōhoku earthquake and subsequent tsunami.
The aerial module consists in a quite innovative architecture of flying machines, the multi-rotorcraft, which is relatively new with respect to the concepts of fixed wing flying. The first applications of this architecture (for unmanned fight) were developed in the 2000’s. It consists of a group of electric motors. Each of them is driving a fixed-pitch propeller directing its thrust in vertical direction. Multi-rotors have been widely accepted by the audience and the market has begun to recognize their potential too. Recreational use of multi-rotor vehicles have become widespread over the last ten years. A whole new industry was created in the use of multi-rotored vehicles for aerial digital video / photography equipment. But the potential uses of rotorcraft for monitoring and SAR purposes are still limited based on their perceived shorter ranges. For example, the trip from a safe area into a radiation contaminated environment may be longer than the range of the copter; thus, the mission time in operation at the site would be limited by the battery capacity.
The state-of-the-art of modern multi-copters has the same range-limitations that early aircraft had when the first carrier ships were conceived, designed and built.
The coupling of a ground crawler with an aerial multi-rotor, which is able to travel for long distances and able to fly for a limited time, respectively, forms an excellent synergy providing a system that is able to travel easily within the operational site and launch the copter to perform aerial surveillance.
2. Description of the System
The ground/aerial robot proposed in this paper is shown in Figure 1. It is composed of a ground module and an aerial module, which will detailed in the following sub-sections.
 |
 |
| Figure 1b - The proposed ground/aerial robot | Figure 1a - The proposed ground/aerial robot |
2.1 Ground Module
As previously described, the operating environment of the current prototype consists of regular floors with steps and ramps (typical environment of industrial sites). A future development is to modify substantially the concept design to let the system operate in outdoor environment.
The ground module shown in Figure 2 is composed by the hybrid rover (named THROO [14]) that has been designed with tracks and legs for an efficient locomotion and with the ability to overcome larger obstacles. The robot has 3 DOFs, two of them are used for mobile tracks giving the ability of straight motion and turning ability. An additional motor is used to actuate the four legs. Each couple of rear and front legs share the same crank and motor-drive providing a mirror trajectory of the leg end-point.
 |
 |
| Figure 2a - The ground module: (left) Mechanical design | Figure 2b:(right) Built prototype |
The prototype size of the ground module is 550 x 400 x 200 mm. All mechanical components are made of aluminum and actuation and transmission systems are of commercial type. The overall mass of the prototype is 4.5 kg (batteries not included). It is worth noting that dimensions vary according to the legs’ configuration. Herein, the maximum values are given. The actuation system is composed of 2 DC motors for the tracks with following features: 24V power supply, max torque of 5 Nm, nominal power of 3.9 W. The motor used to actuate the legs has a 24V power supply, max torque of 12 Nm, nominal power of 24 W.
2.2 Aerial Module
The flying-portion of the system consists of a four-propeller multi-rotor, officially designated as Remote Easy Stackable Quadrotor (RESQ)—named “Quattrino” by the designer, R. Grassi. It has been built as a test bench for original development of the control software and for assessing the procedures of docking and undocking from the crawler. The simple architecture of the quadrotor, with two pairs of counter-rotating propellers, is compensated by a significant effort in the development of the control software. Compared with the bigger sized rotorcraft operations, it is more difficult to achieve a steady flight and to obtain a secure docking.
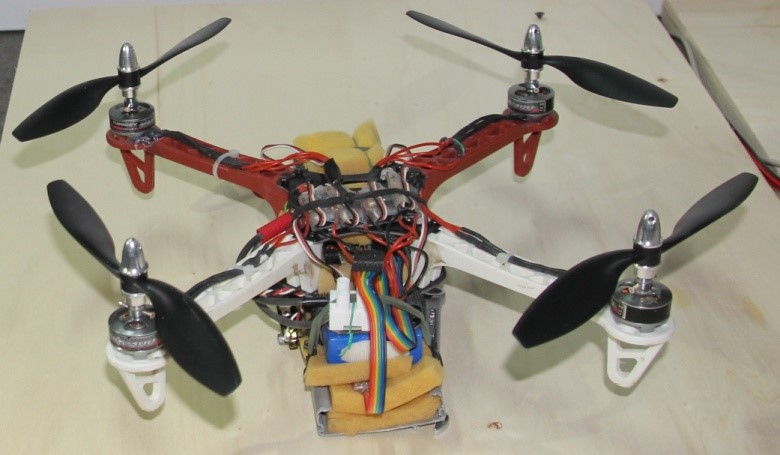 |
| Figure 3 - Aerial module |
The first release of the rotorcraft is remotely controlled with an augmented stability algorithm that combines the inputs from the operator with the readings from the inertial measurement unit, which is housed onboard.
The prototype size of the rotorcraft is 300 x 300 mm, equipped with 200 mm propellers, with a mass of 0.8 kg. It has a flying endurance, performing slow maneuvers and aerial reconnaissance for about one half an hour, and it requires a current of 10 A to remain hovering.
3. Energy management of the unit
Both the aerial and ground modules rely on batteries to store the necessary energy for performing their tasks. The aerial is equipped with a 4 Ah Lithium-Polymer battery pack with fast charge capability up to 20 A. The ground module is powered, at the actual stage of the development, with a SLA (Sealed Lead Acid) battery with 20 Ah capacity. The system designed to allow an energy exchange between the two units when the quad-rotor is docked on the ground crawler (to charge it). The first design allows (through a low current connection) to perform a topping-off charge, keeping the quad-rotor battery at its top level while travelling, and detaching the connection when taking off. The final aim of the project is to design a recharging system which will refuel the quad-rotor, allowing more than one flight per mission.
4. Remote control and data transmission
The rotorcraft remote control requires a constant and stable data transmission of approximately 3 kbit/s upstream for the HMI controls, and 30 kbit/s downstream for the telemetry signal, plus an A/V downlink for the monitoring camera. Several strategies for the remote control signal transmission have been analyzed and the right choice depends on the environment where the robot will be operated. The frequency assignments and the power limitations stated by the regulations must cope, as an example, with the necessity of penetrating concrete buildings and structures. If needed, the integration between the units will be studied in order to let the ground module acting like a signal repeater for the aerial link and multiple paths for control, telemetry and AV links can be implemented.
5. Conclusion
In this paper, a novel solution is proposed to integrate a ground module with an aerial vehicle to exploit the advantages of both motion systems. The system is intended to be used for multi-agent missions, for example, search and rescue applications.
6. References
[1] D. Wettergreen, S. Moreland, K. Skonieczny, “Design and Field Experimentation of a Prototype Lunar Prospector”, the Int. Jnl. of Robotics Research, Vol.29, No.12, 2010, pp. 1550-1564.
[2] E.F. Kececi, “Design and Prototype of Mobile Robots for Rescue Operations”, Robotica, vol. 27, No. 5, 2009, pp.729- 737.
[3] E. Pignaton de Freitas, et alii, “Decentralized task distribution among cooperative UAVs in surveillance systems applications”, 7th Int. Conf. on Wireless On-demand Network Systems and Services (WONS), 2010
[4] W. Li, T. G. Zhang and K. Kuhnlenz, “A vision-guided autonomous quadrotor in an air-ground multi-robot system”, Proc. of IEEE Conf. Robotics & Automation, pp. 2980-2985, Shanghai, May 2011.
[5] P. E. Sandin, Robot Mechanisms and Mechanical Devices Illustrated, McGraw-Hill, 2003.
[6] R. Siegwart, I. R. Nourbakhsh, Introduction to Autonomous Mobile Robots, MIT Press, 2004.
[7] S. Guccione and G. Muscato, “Control Strategies Computing architectures and Experimental Results of the Hybrid Robot Wheeleg”, IEEE Robotics & Automation Magazine, Vol. 10, No.4, 2003, pp. 33-43.
[8] E. Ottaviano, S. Vorotnikov, M. Ceccarelli, P. Kurenev, “Design Improvements and Control of a Hhybrid Walking Robot”, Robotics and Autonomous Systems, Vol. 59, No. 2, 2011, pp.128-141
[9] A. Gonzalez Rodriguez, A. Gonzalez Rodriguez, P. Rea, “A new articulated leg for mobile robots”, J. Industrial Robot, Vol. 38, No. 5, 2011, pp.521 – 532.
[10] P. Wellman, V. Krovi, V. Kumar, W. Harwin, “Design of a Wheelchair with Legs for People with Motor Disabilities”, IEEE Trans. on Rehabilitation Engineering, Vol. 3, No. 4, 1995, pp 343-353.
[11] I Han, “Development of a Stair-Climbing Robot Using Springs and Planetary Wheels”, Proc. of the Inst. of Mechanical Engineers, Part C: Jnl. of Mechanical Engineering Science, 2008, pp. 1289-1296, doi:10.1243/09544062JMES1007.
[12] K. Nagatani, S. Kiribayashi, Y. Okada, K. Otake, K. Yoshida, S. Tadokoro, T. Nishimura, T. Yoshida, E. Koyanagi, M. Fukushima, S. Kawatsuma, “Emergency response to the nuclear accident at the Fukushima Daiichi Nuclear Power Plants using mobile rescue robots”. Jnl. Field Robotics, Vol. 30, 2013, pp. 44–63. doi: 10.1002/rob.21439
[13] B. Yamauchi, P. Rudakevych, “Griffon: A Man-Portable Hybrid UGV/UAV, Industrial Robots, Vol. 31, No. 5, 2004, pp. 443-450.
[14] E. Ottaviano, P. Rea, G. Castelli, ” THROO: A Tracked Hybrid Rover to Overpass Obstacles”, Advanced Robotics, 2014, in print.
 Roberto Grassi is graduated in Mechanical Engineering at Politecnico di Torino he obtained in 2007 the European PhD Title in Applied Mechanics. During the PhD period he spent from January to August 2006 at the IFAS institute in Aachen – Germany to assess the internationality of his doctorate.
Roberto Grassi is graduated in Mechanical Engineering at Politecnico di Torino he obtained in 2007 the European PhD Title in Applied Mechanics. During the PhD period he spent from January to August 2006 at the IFAS institute in Aachen – Germany to assess the internationality of his doctorate.
At the moment he is a fellow researcher at Department of Mechanics – Politecnico di Torino in the fields of Mechatronics for Aerospace Engineering and remote controlled aircrafts (UAVs).
 Pierluigi Rea
Pierluigi Rea
In 2002 he got the Master Degree in Mechanical Engineering at the University of Cassino by discussing a thesis on the Experimental Analysis of a PWM Modulated Digital Valve. In 2007 he got the Ph.D. in Civil and Mechanical Engineering by discussing a thesis on the Mechatronic Design of a Robotic Hand with Pneumatic Actuation. From 2007 to 2010 he was Assistant Researcher at the University of Cassino. Currently, he is Assistant Professor at the same University. His main research interests concern topics on the Fluid Automation and Mechatronics, Mechanical Design and Robotics. He is author and/or co-author of more than 55 scientific papers, which appeared on Proceedings of National and International Conferences, International Journals and Books.
 Paolo Maggiore is a professor at the Mechanical and Aerospace Engineering Department of Politecnico di Torino, that joined in 1992, where he teaches aerospace general systems engineering. Currently his students are involved in projects ranging from hydrogen fuel cell powered airplanes and UAVs, and health monitoring of flight controls, to multi-disciplinary design optimization of aerospace systems design.
Paolo Maggiore is a professor at the Mechanical and Aerospace Engineering Department of Politecnico di Torino, that joined in 1992, where he teaches aerospace general systems engineering. Currently his students are involved in projects ranging from hydrogen fuel cell powered airplanes and UAVs, and health monitoring of flight controls, to multi-disciplinary design optimization of aerospace systems design.
 Erika Ottaviano received the Master Degree summa cum laude in 1998 and Ph.D. in Industrial Engineering on Feb. 2002 at the University of Cassino. Since 2002 she is Assistant Prof. for Mechanics of Machines and Mechanical Systems. Since 2012 she is Editor for the Int. Jnl. of Imaging and Robotics, since 2011 she is member of the Editorial Board of the Int. Jnl. of Advanced Robotic Systems, INTECH Open Access Pub. Since 2004 she is member of the IFToMM Tech. Committee for Computational Kinematics, she serves as secretary since 2009. Her research interests are: Mechanics, Robotics, Mechanical Design. She is author and co-author of more than 145 papers published in Books, Proceedings of National and International Conferences or in Journals.
Erika Ottaviano received the Master Degree summa cum laude in 1998 and Ph.D. in Industrial Engineering on Feb. 2002 at the University of Cassino. Since 2002 she is Assistant Prof. for Mechanics of Machines and Mechanical Systems. Since 2012 she is Editor for the Int. Jnl. of Imaging and Robotics, since 2011 she is member of the Editorial Board of the Int. Jnl. of Advanced Robotic Systems, INTECH Open Access Pub. Since 2004 she is member of the IFToMM Tech. Committee for Computational Kinematics, she serves as secretary since 2009. Her research interests are: Mechanics, Robotics, Mechanical Design. She is author and co-author of more than 145 papers published in Books, Proceedings of National and International Conferences or in Journals.
About the Newsletter
Editors-in-Chief

Jin-Woo Ahn
Co-Editor-in-Chief

Sheldon Williamson
Co-Editor-in-Chief
TEC Call for Articles 2023 - Advances in Charging Systems
The TEC eNewsletter is now being indexed by Google Scholar and peer-reviewed articles are being submitted to IEEE Xplore.
To submit an article click here.