

A Functional Modus Operandi to Design Absolute Battery Operated Short Endurance Vessels
Abstract – The rising global warming levels and petrochemical reserve depreciation open a new gateway to the automotive industry to lead the world into a carbon-free future. The successful commercialization of battery-operated road-going vehicles stepping up the automotive industry spirits to migrate this technology to other transportation sectors. Limited by the lithium-ion battery energy density, absolute battery propulsion is not a reality for large marine vessels operating over longer distances; still, the vessels operating over short distances are suitable. This article discusses the evolution of marine propulsion technology and bottlenecks involved in the remodification/up-gradation of existing diesel engine-driven vessels for absolute battery operation. A brief functional modus operandi is described to design a new absolute battery-operated marine vessel along with the adopted tools and techniques. A short analytical discussion was presented on marine powertrain architectures about the sizing of propulsion equipment.
Keywords – DC-AC power converters, fluid dynamics, lithium-ion batteries, marine transportation, marine vehicles.
I. INTRODUCTION:
International shipping discharges approximately 796 million tons of CO2, i.e., around 2.2% of the global emissions. International Maritime Organization forecasts that by 2050, carbon emanations from worldwide shipping may increase around 50% to 250% [1]. In 2018, the Intergovernmental Panel on Climate Change warned the transportation sector to reduce 45% of 2010 CO2 levels by 2030 and reach 'Net Zero' by 2050 to limit global warming to 1.50C [2]. Absolute battery-operated marine vessels are becoming the marine industry’s primary interest due to the alarming effects of global warming throughout the world. According to the new research report issued by IDTechEx entitled "Electric Boats and Ships 2019-2029", the market for hybrid and pure electric boats and ships will rise rapidly to over US$20 billion worldwide in 2029 for non-military applications [3]. In the present scenario, as the energy density of lithium-ion batteries are very less compared to conventional marine fuels, vessels operating over short distances suit well for battery propulsion. The energy density of batteries is very poor compared to fuels and the power conversion efficiency of the converter is way better than diesel engines (DE). So, there should be an agreement between propulsion power and operating time. The term short endurance can be defined for high propulsion power operation for a few minutes or low propulsion power operation for a few hours. The battery-operated short endurance-vessels (BOSE-V) are not completely strange for the marine industry.
II. EVOLUTION OF MARINE PROPULSION TECHNOLOGY:
In 1886, Siemens built the world's first electric boat, "ELEKTRA" with dimensions 11 m long and 2 m wide and equipped with a 4.5 kW DC motor of 195 kg weight and 80 batteries with a rating 2.9 kW of weight 1800 kg. Due to the low power density of the motor and low energy density of batteries, this model was not a commercial success. In 1933, Siemens built a steamer with two propellers coupled to individual electric motors powered by two steam-turbogenerators. Later, internal combustion engines gained popularity for industrial & transportation applications and gained preference over contemporary electric motors by the high power & energy densities, compactness, and robustness. As time progresses, the electric drive technology evolved, and shipbuilders found that the combination of diesel and electric drives can yield better performance and fuel savings. In 1997, Siemens & Schottel shipyard developed a Diesel-Electric ship propulsion system with permanent magnet excitation, and this design saved 10% fuel consumption. With the revolutionary evolution of electric motor designs, power electronics, and lithium-ion battery technology, the complete battery-operated marine electric propulsion will become a reality for electric vehicles and BOSE-Vs. In 2015, Siemens had designed the world's first complete battery-operated electric ferry, "Ampere" with 900 kW propulsion power and 1 MWh onboard lithium-ion battery. It maneuvers for about 20 min at a maximum speed of 9.7 knots by consuming 150 kWh energy per trip. BOSE-Vs are suitable to operate for transportation and minor harbor operations, and it is anticipated that many vessels are ready to upgrade for battery propulsion but involves several bottlenecks.
III. BOTTLENECKS IN UP-GRADATION TO BATTERY PROPULSION:
The static and dynamic stabilities (SDS) play a primary role in the vessel design and up-gradation. In a generic DE propelled vessel, the DE and fuel tank (FT) occupy more space, and their weight is around 50% of the total vessel weight. To achieve good static stability in standstill conditions and dynamic stability at rated vessel speed, DE & FT need to be arranged at specified locations in the vessel. The fuel tank will be emptied during vessel operation and overall vessel weight decreases, which propagate a severe threat to dynamic stability and the vessel may end up with an accident. A ballast water tank will be placed in a crucial position in the vessel to address SDS issues. It will be filled/emptied according to the vessel SDS constraints. There is no consequence of vessel weight reduction during the operation of BOSE-V; hence, the design aspects of BOSE-V are clearly deviating from conventional marine vessel design. Therefore, converting a DE-driven vessel to BOSE-V is highly critical and needs major remodification; still, the success rate depends on the vessel's operational objectives and the efficiency of the powertrain components. It is always recommended to build a new vessel for battery operation instead of up-gradation. In this article, a brief discussion is presented on the steps involved in designing a new BOSE-V.
IV. A FUNCTIONAL MODUS OPERANDI FOR BOSE-V:
|
(a) |
(b) |
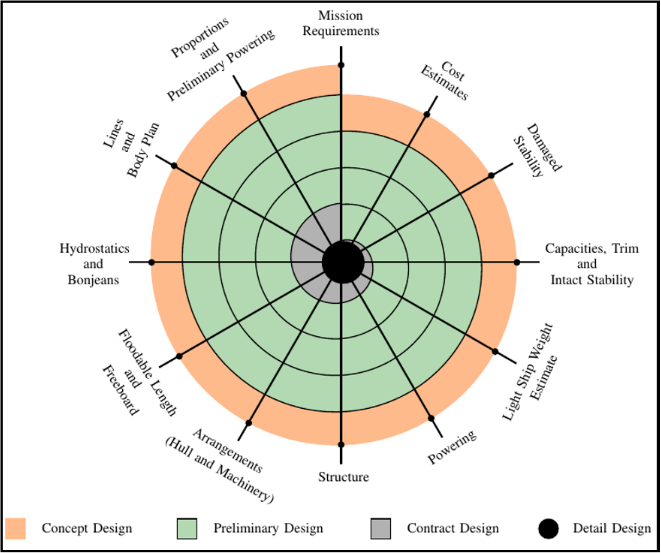
Figure 1: Battery-operated marine vessel (a) Design spiral: Taggart (1980) [4]. (b) Vessel model.

Figure 2: Complete battery-operated marine electric powertrain.
The design of BOSE-V should involve analysis and design stages to maximize operational reliability and safety. The harbor vessels are application-specific, and design should be bound to native shipping class register rules. As shown in Fig. 1(a), vessel design involves several phases and finally yields a complete model similar to Fig. 1(b). The concept design involves collecting vessel data, operational specifications, and complete details about each component placed in the vessel. Fig. 2 shows the typical marine electric powertrain with all the necessary components. Based on the inverter topology, the bidirectional DC-DC converter (BDC) can be avoided with certain operational limitations. The necessary estimations/assumptions should be made regarding the propulsion equipment. The major factor influencing the vessel weight & volume is battery energy density. In this study Toshiba SCiB 23 Ah is considered a propulsion battery, which is having a high charge-discharge rate, long life, and is certified for marine propulsion application. In the preliminary stage, several vessel designs will evolve and a best-fitting model that addresses the design objectives will be finalized to materialize the vessel. The major components of BOSE-V are hull form, propeller, motor, power converter, lithium-ion battery, BMS, speed controller, and cooling system. For application-specific vessel design, it is recommended to start the design and analysis from hull form to the battery. In the market, several marine design tools (MDT) are available to optimize the hull form and propeller for specific operations. These tools were majorly developed by generalized empirical and semi-empirical formulae derived from various vessels’ data.
After completing the basic design with MDT, a parametric analysis-based optimization program should be coded with clear objectives of propeller thrust, motor rating, battery size, etc. By analyzing the parametric analysis data, a global optimum can be found with the minimum effective power of the hull for maximum vessel speed with maximum possible operating time. Effective power is the required power supplied to the hull to maneuver at a given speed with a specified weight (includes the vessel’s own weight). The results can be confirmed by a towing tank test (TTT) or by computational fluid dynamic (CFD) simulation. The optimized final hull model should be scaled down to prepare a prototype model to perform TTT. These results are very accurate and reliable and validated in a real-time environment. TTT involve huge cost, manpower, and need specialized transportation for the prototype. With the advancement in CFD computation technology, it becomes as reliable as TTT, and results are trustworthy when a simulation is performed perfectly without omitting details and by adopting advanced techniques. ANsys moving mesh simulation with macro programming will yield more accurate results; the ANsys CFD model of hull form is shown in Fig. 3(a). Once the hull form results satisfying with the design objectives, can start propeller design for the maximum thrust requirement.
Opensource tool Openprop 3.3.4 is adopted for propeller design optimization. For the given vessel speed, the tool will provide an optimized propeller design with open water characteristics. The required propulsion power can be calculated by empirical formulae and the results should be verified with CFD analysis. Once the results are satisfactory and do not conflict with the assumptions made at the beginning stage of hull design, that model can be finalized to calculate further powertrain component details. Fig. 3(b) presents the CFD model of a six-bladed ducted Kaplan propeller. By adding appendage factors as per class rules the required propulsion motor size will be deduced. For the given torque-speed specifications the motor selection is a very important influencing factor in the entire powertrain. A permanent magnet synchronous motor is appropriate for the BOSE-V by its power density, design feasibility, and efficiency at light loads. The converter and battery system should be sized as per the drive cycle specifications. If any differences are found in the presumed data and final results, the process should be in the loop until a competent solution evolved with minor variations for which a reliable optimization technique should be adopted.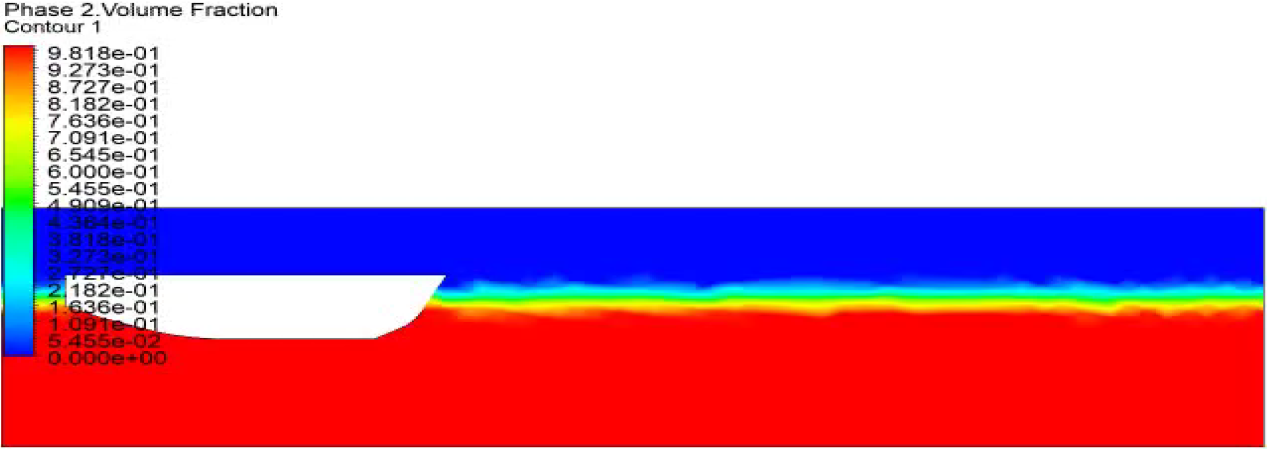
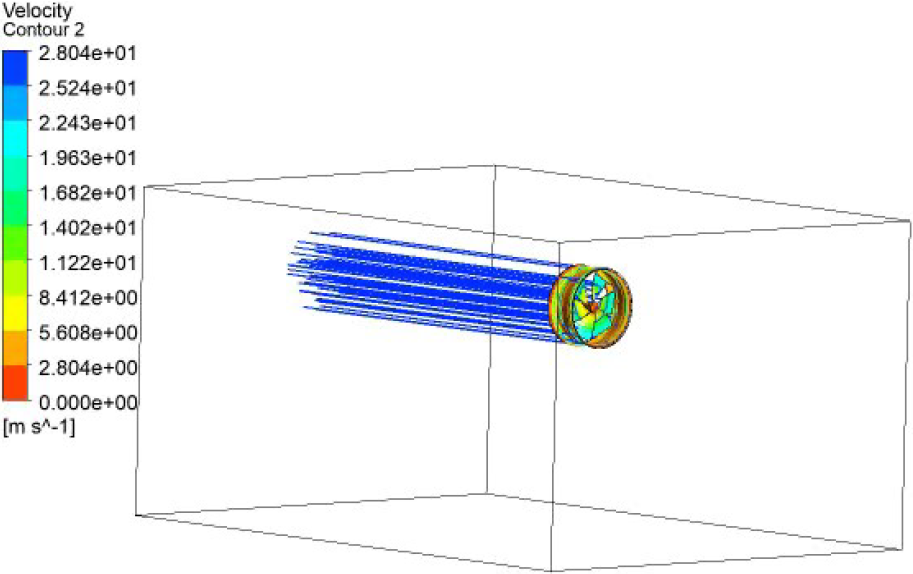
Figure 3: CFD Analysis (a) Hull form. (b) Ducted Kaplan propeller
The selection of converter topology and battery chemistry decides the operational efficiency, and state of health of the powertrain. The entire reliability of the vessel depends on the battery management system (BMS), hence, instead of a centralized battery system, distributed battery modules with multilevel inverters should be selected for extended operational reliability. The cascaded H-bridge inverter and modular multilevel converter have notable advantages in medium voltage motor drive applications. Adopting multilevel topologies for the BOSE-V will increase operational reliability, redundancy, fault tolerability, and allow feasible master-slave BMS architecture [5]. The optimal sizing of the battery system enables effective charging portfolios allocation and efficient energy management at the prospective seaport charging station [6].
V. CONCLUSION:
The evolution history of marine propulsion is discussed by mentioning benchmarking historical events starting from commercially failed “ELEKTRA” to a most successful “Ampere” ferry. The bottlenecks involved in the up-gradation of DE-driven vessels for absolute battery operation are explained in detail and suggested a new vessel design for absolute battery propulsion. A functional modus operandi to design a BOSE-V is discussed briefly by mentioning the procedural techniques and tools adopted in this study. The typical powertrain architectures are discussed by mentioning the battery and converter selection for reliable master-slave BMS.
ACKNOWLEDGEMENT:
This collaborative research (Indian Institute of Technology Roorkee and Indian Maritime University, Visakhapatnam) is supported by The Ministry of Ports, Shipping and Waterways, Government of India vide grant number MSR-1327-WRC, along with research fellowships.
REFERENCES:
[1] IMO.org. (2019), “Third IMO Greenhouse Gas Study 2014”. [online] Available at: https://www.imo.org/en/OurWork/Environment/Pages/Greenhouse-Gas-Studies-2014.aspx [Accessed 10 July. 2021].
[2] IPCC (2018), “Summary for Policymakers of IPCC Special Report on Global Warming of 1.5ºC approved by governments”. [online] https://www.ipcc.ch/site/assets/uploads/ 2018/11/pr_18100 8_P48_spm_en.pdf. Available at: [Accessed 10 July. 2021].
[3] Gear, L., “Electric and Hybrid Boats and Ships 2019-2029: Ferries, Offshore Support Vessels, Tugboats, Fishing Boats, Cruise Ships, Ocean-going Trading Vessels, Recreational Boating”, IDTechEx Research Report, Sep. 2019.
[4] R. Taggart, (Ed), “Ship design and construction,” Society of Naval Architects and Marine Engineers (SNAME), 1980.
[5] D. Ronanki and S. S. Williamson, "Modular Multilevel Converters for Transportation Electrification: Challenges and Opportunities," IEEE Trans. on Transp. Electr., vol. 4, no. 2, pp. 399-407, June 2018.
[6] V. Tummakuri, T. R. Chelliah and U. S. Ramesh, “Energy Management and Charging Portfolio Analysis for Future Battery Powered Harbor Vessels,” in Proc. IEEE International Conference on Power Electronics, Drives and Energy Systems, 2020, pp. 1-6.
AUTHORS:
 |
Vidyasagar Tummakuri (Student Member, IEEE) received the bachelor’s degree in Electrical and Electronics Engineering from Sri Sarathi Institute of Engineering and Technology, Andhra Pradesh, India, in 2007, and the master’s degree in Power Electronics and Drives from the National Institute of Technology Agartala, India in 2018. Currently, he is working toward a Doctoral degree by researching Battery-operated Marine Vessels at the Department of Water Resources Development and Management, Indian Institute of Technology Roorkee, India. From 2009 to 2016, he served as Contract Technical Associate at Research Centre Imarat Hyderabad, an independent software developer for various clients, and teaching faculty at Malla Reddy Engineering College and Management Science and SLC’s Institute of Engineering and Technology. His research interests include optimal designing of the battery-operated marine electric powertrains, sensorless PMSM integrated with KAPLAN ducted propeller, multi-level inverter topologies, battery energy management, and power quality. |
 |
Thanga Raj Chelliah (Senior Member, IEEE) received the Diploma in electrical engineering from Government Polytechnic College, Nagercoil, India, in 1996, the B.Eng. degree in electrical engineering from the Coimbatore Institute of Technology, Coimbatore, India, in 2002, the M.Eng. degree from Anna University, Chennai, India, in 2005, and the Ph.D. degree in electrical engineering from the Indian Institute of Technology (IIT) Roorkee, Roorkee, India, in 2009. He is currently working as an Associate Professor with the Department of Water Resource Development and Management, IIT Roorkee, and an Officer-in-Charge with Hydropower Simulation, Power Electronics, and Hydroelectric Machines Laboratories. He has a few years of industrial experience where he was involved in energy conservation activities in electrical equipment. He has developed the Hydropower Simulation Laboratory, IIT Roorkee, in 2015, which is committed at present for the research funded by national agencies including THDC India Limited, Central Power Research Institute, National Mission on Power Electronics Technology, and Ministry of Shipping. |
About the Newsletter
Editors-in-Chief

Jin-Woo Ahn
Co-Editor-in-Chief

Sheldon Williamson
Co-Editor-in-Chief
TEC Call for Articles 2023 - Advances in Charging Systems
The TEC eNewsletter is now being indexed by Google Scholar and peer-reviewed articles are being submitted to IEEE Xplore.
To submit an article click here.