

Switched Control Systems Applied to Safety-Critical Motor Drives
Ali Bazzi, Michael Stettenbenz, and Yiqi Liu
University of Connecticut, Storrs, CT
1. Introduction and Motivation
Designs of conventional aircraft as well as more-electric aircraft (MEA) require an electrical power system with a large number of electric motors, generators, and drives. Whether these are in starters/generators, pumps, or in fly-by-wire systems that replace pneumatic and hydraulic systems, their availability is of major importance especially to safely complete a flight. Safety-critical applications such as MEA require high reliability and availability of these electric drive systems, including power electronic converters, electric machines, passive components, controllers, and sensors. Also, unless a motor drive is operated in open-loop, it requires some form of position, speed, current, and/or voltage sensing. Even with open-loop drives, current and voltage monitoring is available for data-logging or health monitoring purposes. In addition to aircraft electrical systems, many electric motor drives in other transportation applications are safety-critical and operate under severe environmental conditions, including those in electric and hybrid cars, electrical marine propulsion, and electrified railway systems.
This article focuses on sensor faults in safety-critical electric motor drives. Under sensor faults, controllers utilizing faulty sensors will try to regulate a drive’s operation with inaccurate or missing feedback, and may therefore try to operate outside their design space. However, if another controller that does not utilize the faulty sensor can take command of the drive, this controller should be able to regulate the drive’s operation as desired. In order to engage this new controller, switched control systems theory can be utilized especially if smooth transitioning between controllers is achieved while maintaining acceptable switching transients.
2. Switched Control Basic Structure
The general area of switched control introduces multiple controllers to regulate the output of a plant or process. These controllers are selected to either operate the plant in different spaces, i.e. each controller is responsible for certain operating regimes, or to maintain the plant’s operation given available information to the controllers. An example of a switched control system in shown in Figure 1 [1]. The term “switching control” should not be confused with semiconductor switching in power converters. Typically in switched control systems, a slower step-like function is applied to transition between multiple possible controllers of a system to respond to an event.
Figure 1: General Switched Control System [1]
The supervisor is responsible for determining which controller should be engaged, and it should be able to handle smooth transitioning from one controller to the other. In order to design controllers 1…m, stability of the plant or process for each controller should be ensured, subject to constraints for each operating regime. For example, if controller 1 is engaged for an operating design space or regime R1, the closed-loop system utilizing controller 1 should be stable for R1. Even though Figure 1 does not show sensors in the feedback loop, sensors are implicit between the process output y and the supervisor input. Sensors may not be required between the controllers’ outputs and the supervisor since it is likely that such inputs u1…um are available to the supervisor on interconnected embedded platforms. Controllers and the supervisor may even be implemented in a single processor or embedded platform, and u1…um may be available as “soft” versions to the supervisor without external inputs. An excellent resource on control of switched systems in [2]. Prior examples of switched control systems application to drives with minimal or no focus on smooth transitioning include [3]-[5]. Example applications of switching control in aerospace systems are [6], [7]. The focus of this article is to introduce smooth transitioning in switched control systems applied to motor drives where switching transients are minimized.
3. Switching Control in Motor Drives
In order to mitigate sensor faults and their impact on safety-critical motor drives, a switching control method was proposed in [8]. The main issue with switching between various motor controllers is that each controller operates in a different reference frame, and/or with different command signals. For example, standard direct torque control (DTC) is usually implemented with a switching table in the stationary reference frame, provides voltages commands to the power converter, and utilizes voltage and current feedback. Indirect field oriented control (IFOC) uses the synchronous reference frame and current and speed or position feedback to send current commands to the power converter. Open-loop V/f control is typically applied in the synchronous reference frame but sends voltage commands to the power converter. The discrepancy between reference frames and command signals sent to the power converters, makes the inputs into the plant (i.e. motor drive in this case) asynchronous between controllers. The benefit, however, is in the fact that these three controllers use different sensors, if any. This naturally suggests that if one sensor fails, another controller can be engaged. The main trade-off is in performance of the motor drive in terms of tracking the desired speed or torque command.
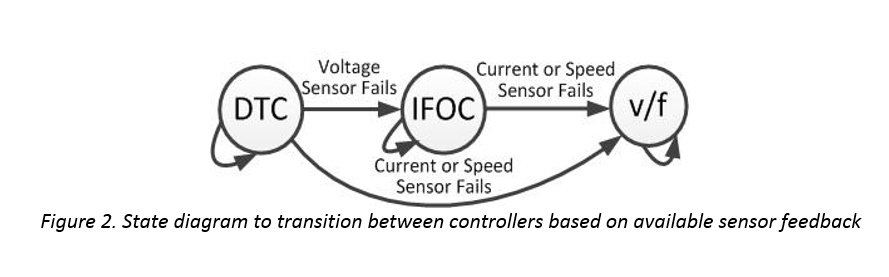
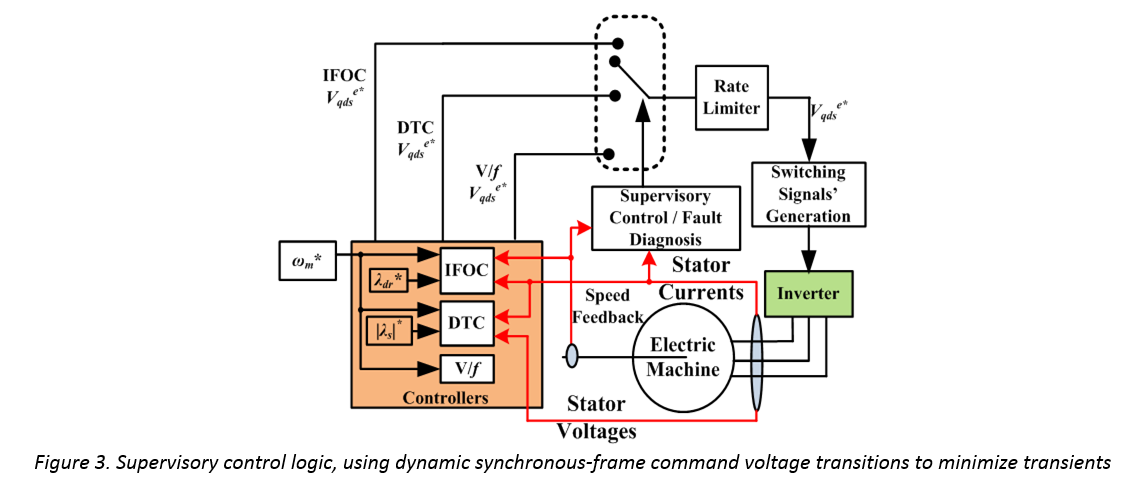
The proposed smooth switching control scheme in [8] utilizes modified versions of DTC and IFOC in addition to the conventional V/f control, such that all command signals are stator voltage commands in the synchronous reference frame (Vqdse*). The supervisor in this case is a sensor-fault-diagnosis algorithm that is integrated with simple logic illustrated in the state diagram in Figure 2 to determine which controller should be engaged based on available sensors and current controller status. The switched control system is demonstrated in Figure 3. Smooth transitioning can be maintained using either simple rate limiters that adjust the transitioning rate between controllers, or a more advanced integral-type variable rate transitioning (VRT): ![]() , where A is an integral gain.
, where A is an integral gain.
When a sensor fault is detected, the supervisor initiates controller transitioning from one controller to another as a step function based on the state diagram in Figure 2. While a step-function transitioning can cause undesired transients even when controller commands are of slightly different values in the same reference frame, smooth rate transitioning is employed. Even though simple rate limiting is acceptable, VRT provides both ramp-up/ramp-down of the rate transitioning between two command voltages such that transitioning is faster out of the first controller, and smoothly engages the second controller.
4. Sample Results
An example is presented here for current or speed sensor failure while a 3 hp induction motor drive is operating under DTC. The motor is fed by a three-level voltage-source inverter (VSI) and implements the method shown in Figure 3. At t=2s, a current or speed sensor fault occurs where the supervisor would detect the fault and initiate transitioning from DTC to V/f as shown in the state diagram shown in Figure 2. Figure 4 shows results for two cases: 1) the ABC case which is when switching between controllers occurs after the inverter switching signals are generated (not shown in Figure 3, before the inverter green box); and 2) QD0smooth where the smooth transitioning proposed in Figure 3 is implemented. It is clear that the proposed method can significantly minimize both current and torque transients. Note that in order to diagnose sensor faults, several methods have been proposed in the literature, e.g. [9]-[13]. The authors are currently considering integration of simple logic-based methods which they have established for fault diagnosis in complex systems, e.g. [14], which successfully demonstrated the ability to diagnose sensor faults in a an electric vehicle.
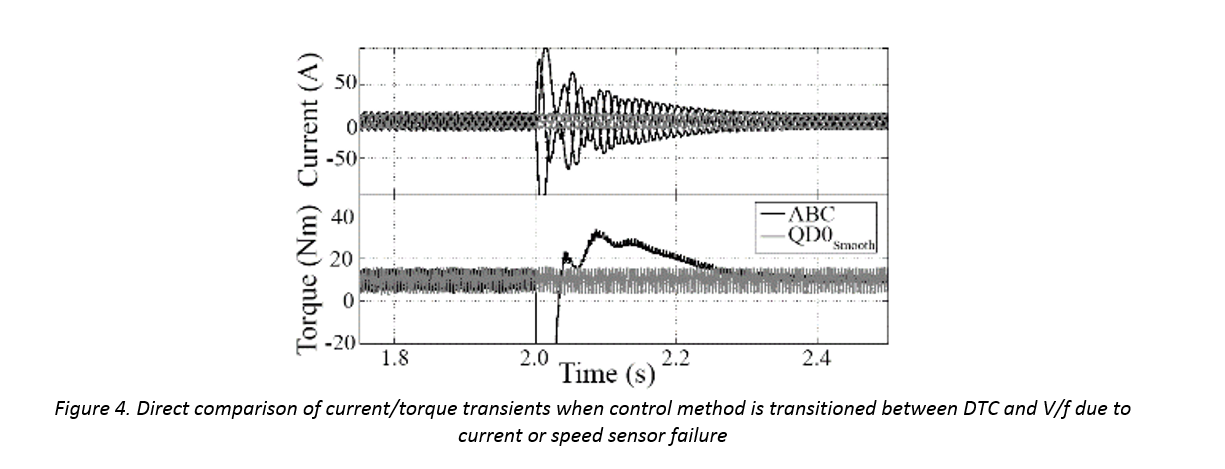
It is clear from the results in Figure 4 that aerospace drives can significantly benefit from the proposed smooth switching control method, where current and torque transients can be suppressed and drive operation continues at or near the desired pre-fault operating conditions. Implementation of the proposed method on a processor-in-the-loop platform has verified its effectiveness for implementation in one of the most common commercial digital signal processors (TMS320F28335) through optimized embedded code and with embedded resources that can be easily commercialized for aerospace and other applications [8].
5. Conclusions
Switched control systems theory applied to motor drives, especially in aerospace and other safety-critical drives, is a promising scheme that can significantly enhance their availability to safely complete a mission. The presence of multiple controllers that operate in tandem to be ready for take-over after sensor fault occurrence has been shown to smoothly cause the drive to ride through sensor faults. The proposed method relies on the availability of various controllers to serve one objective, and the ability of a supervisor to diagnose sensor faults and react quickly. Many online fault diagnosis methods can be used within the supervisor block, thus the proposed method can provide a new approach to self-healing and robust electrical drives.
References
[1] Available Online at: http://liberzon.csl.illinois.edu/
[2] Daniel Liberzon, "Switching in systems and control, ser. Systems & Control: Foundations & Applications," Springer, 2003.
[3] D. Diallo, M. E. H. Benbouzid and A. Makouf, "A fault-tolerant control architecture for induction motor drives in automotive applications," in IEEE Transactions On Vehicular Technology, vol. 53, pp. 1847-1855, 2004.
[4] M. E. H. Benbouzid, D. Diallo, and M. Zeraoulia, "Advanced Fault-Tolerant Control of Induction-Motor Drives for EV/HEV Traction Applications: From Conventional to Modern and Intelligent Control Techniques," in IEEE Transactions on Vehicular Technology, vol.56, pp.519-528, 2007.
[5] R. B. Sepe, B. Fahimi, C. Morrison and J. Miller, "Fault tolerant operation of induction motor drives with automatic controller reconfiguration," in IEEE International Electric Machines and Drives Conference, 2001, pp. 156-162.
[6] Y. Qi, W. Bao, and J. Chang, "State-Based Switching Control Strategy with Application to Aeroengine Safety Protection," in Journal of Aerospace Engineering, vol. 10, pp. 1-11, 2013.
[7] Y. Qi et al. "Command switching based multiobjective safety protection control for inlet buzz of scramjet engine," in Journal of the Franklin Institute, pp. 5191-5213, 2015.
[8] M. Stettenbenz, Y. Liu and A. Bazzi, "Smooth switching controllers for reliable induction motor drive operation after sensor failures," in Proc. IEEE Applied Power Electronics Conference and Exposition, 2015, pp. 2407-2411.
[9] N. M. A. Freire, J. O. Estima and A. J. M. Cardoso, "A New Approach for Current Sensor Fault Diagnosis in PMSG Drives for Wind Energy Conversion Systems," in IEEE Transactions on Industry Applications, vol. 50, pp. 1206-1214, March-April 2014.
[10] B. Gou, X. L. Ge, Y. C. Liu and X. Y. Feng, "Load-current-based current sensor fault diagnosis and tolerant control scheme for traction inverters," in Electronics Letters, vol. 52, pp. 1717-1719, Sept. 2016.
[11] B. Boulkroune, M. Gálvez-Carrillo and M. Kinnaert, "Combined Signal and Model-Based Sensor Fault Diagnosis for a Doubly Fed Induction Generator," in IEEE Transactions on Control Systems Technology, vol. 21, pp. 1771-1783, Sept. 2013.
[12] K. S. Gaied, H. W. Ping, M. N. Uddin, M. Khalid and A. Saghafina, "Wavelet based prognosis for fault tolerant control of induction motor with stator and speed sensor faults," in Proc. IEEE Industry Applications Society Annual Meeting, 2012, pp. 1-8.
[13] A. A. Silva, A. M. Bazzi and S. Gupta, "Fault diagnosis in electric drives using machine learning approaches," in Proc. IEEE International Electric Machines & Drives Conference, 2013, pp. 722-726.
[14] A. Ulatowski and A. M. Bazzi, "A Combinational-Logic Method for Electric Vehicle Drivetrain Fault Diagnosis," in IEEE Transactions on Industry Applications, vol. 52, pp. 1796-1807, March-April 2016.
 |
Ali M. Bazzi (S’07, M’10) received the B.E. and M.E. degrees in electrical engineering from the American University of Beirut, Beirut, Lebanon, in 2006 and 2007, respectively. He received the Ph.D. degree from the University of Illinois at Urbana-Champaign (UIUC), Urbana, IL, USA in 2010. He joined the Department of Electrical and Computer Engineering (ECE), University of Connecticut (UCONN), USA, in 2012 as an Assistant Professor where he established and currently directs the Advanced Power Electronics and Electric Drives Laboratory (APEDL). He was a senior power electronics electrical engineer with Delphi Electronics and Safety in 2011-2012, a visiting assistant professor at UIUC during spring 2011, an engineer with Bitrode Corporation in the summers of 2008 and 2009, and a research and teaching assistant at UIUC between 2007 and 2010. His research interests include power electronics design, control, optimization, fault diagnosis, and reliability modeling in motor drives, solar photovoltaics, and other applications. He is also interested in renewable energy integration in micro-grids, and real-time control and optimization of energy systems in general. |
 |
Michael Stettenbenz received the B.S. degree in electrical engineering from the University of Connecticut, Storrs, CT, USA in 2013. He is currently pursuing his M.S. degree in electrical engineering at the Advanced Power Electronics and Electric Drives Lab at the University of Connecticut. His main research focus has been on switched control systems in electric drives, as well as embedded systems considerations for power electronics applications. |
 |
Yiqi Liu (S'14) received his B.S degree in Material Science and Engineering from Central South University, China, in 2012. He joined Advanced Power Electronics and Electric Drives Laboratory (APEDL), University of Connecticut, USA, in 2012 as a Ph.D. student, and received his M.S. degree in Electrical and Computer Engineering in 2016. His interests are in modelling, analysis and control of electric motors, motor drives, and power electronics for electric machine applications. |
About the Newsletter
Editors-in-Chief

Jin-Woo Ahn
Co-Editor-in-Chief

Sheldon Williamson
Co-Editor-in-Chief
TEC Call for Articles 2023 - Advances in Charging Systems
The TEC eNewsletter is now being indexed by Google Scholar and peer-reviewed articles are being submitted to IEEE Xplore.
To submit an article click here.