

eCo-FEV: efficient Cooperative infrastructure for Fully Electric Vehicles
By Nadim El SAYED & Lan LIN
Clean transportation represents a key economic and social factor to the development of modern and future societies. Developing clean technologies for vehicles is one of the prioritized actions of European economic recovery plan [1]. The introduction of Fully Electric Vehicles (FEVs) has been announced by several car manufacturers. However, range anxiety is one of the main challenges for mass introduction of FEV to the market. Users need to be assisted in real time in order to avoid FEV energy shortage in case of unexpected traffic situation and energy provision. Furthermore, different social infrastructure systems also need to be integrated into fast emerging smart city technologies to improve the societal efficiency including energy management and traffic management. The integration of FEVs with multiple relevant infrastructure systems would potentially bring high benefits in FEV introduction and in smart city development.
The European Commission co-funded project eCo-FEV [2] proposes a cloud based ICT (Information and communications technology) electric mobility platform for the integration of FEVs into cooperative infrastructure systems. This platform enables connection and information exchange between multiple infrastructure systems including road IT infrastructure, parking infrastructure, public transportation operator and vehicle charging infrastructure. Due to standardized vehicle to vehicle (V2V), vehicle to infrastructure (V2I) communication technologies and standardized protocols for information exchange between stakeholders’ information systems, such integration will further promote the development of advanced telematics services for FEV users. The principal functions offered by the eCo-FEV system are trip planning and assistance services. The system will help travelers to plan their itinerary and, if necessary, adapt it to environmental factors such as traffic and weather conditions and energy consumption evolution (historical curves of battery state of charge (SOC) over time) by monitoring the FEV remaining battery energy and road traffic conditions.
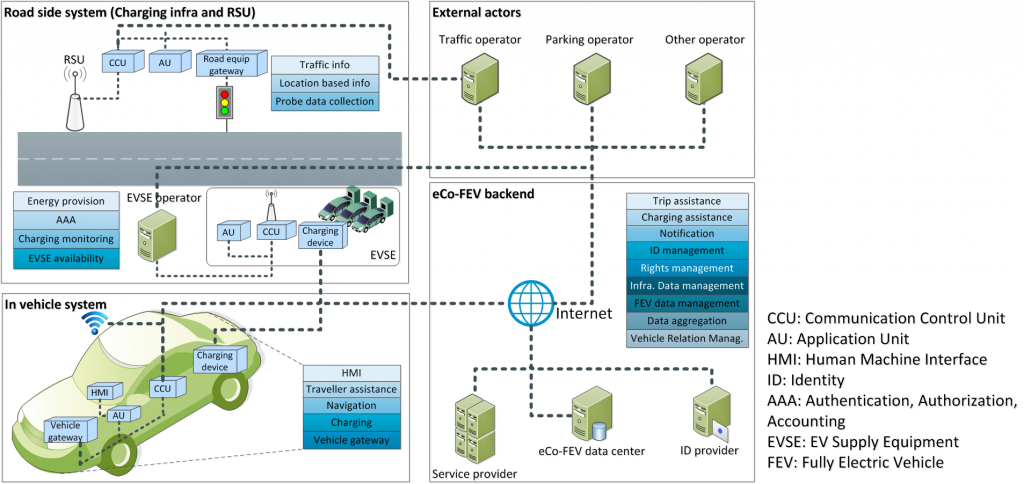 |
| Figure 1: High level functional architecture of the eCo-FEV system |
The eCo-FEV system is composed of several sub-systems as illustrated in the high level functional architecture in figure 1:
1) On Board Unit (OBU) integrated in FEV: OBU includes communication hardware (e.g. Wi-Fi, UMTS, ITS G5, etc.), application unit hardware, vehicle gateway to interface with FEV electronic systems, HMI device and the in vehicle charging system (inductive or conductive power transfer).
2) Road Side Unit (RSU): RSU is installed at road side. It includes communication hardware (e.g. Wi-Fi, UMTS, ITS G5, etc.), application unit hardware and potential gateways to interface with road side equipment or with vehicle charging infrastructure. It could provide location based services to FEV users and Internet access for mobile devices to improve the communication connectivity.
3) eCo-FEV backend: eCo-FEV backend is a backend system that includes at least a middleware platform that accommodates a set of functionalities for data collection, data management and data aggregation and one service provider platform that provides FEV services to customers. In addition, other platforms may also be included in eCo-FEV backend, for instance a platform that manages the ID and contract information of the customer;
4) Vehicle charging infrastructure: Vehicle charging infrastructure includes EV supply equipment (EVSE) at road side and a backend operator (EVSE operator). An important technical challenge of the eCo-FEV project is to build a prototype for “Charging While Driving” (CWD). CWD technology enables the transmission of energy from charging infrastructure to FEVs in mobility. Besides the challenges induced by the need of power electronics for the energy transmission and the requirements of electromagnetic compatibility (EMC), CWD also poses many ICT-related challenges. First one is the need of a wireless communication between the EV and the EVSE. This communication is not only needed by the charging process itself, it is also required to manage the charging processes. For the charging process, EVSE and EV need to exchange information regarding the charging parameters including the length of the coil-group, speed range, antenna rated power and so on. During charging, the EVSE might give the EV additional information regarding the position of the FEV or the position adjustment information. Within the eCo-FEV project, these requirements will be the basis of designing the wireless communication between EVSE and EV. Although the ISO standard ISO 15118 [3] aims at addressing the EVSE-EV communication for the conductive charging cases, its extension in the parts 6 (General Information and use case definition for wireless Vehicle to Grid V2G communication), part 7 (Network and application protocol requirements for wireless communication), and part 8 (Physical layer and data link layer requirements for V2G wireless communication) to cover the wireless charging are still in draft-phase. Thus the experiences and results gained in the eCo-FEV project would make a promising contribution towards shaping the future of CWD-Technology.
The eCo-FEV project also aims at providing an ICT Integration of different actors in the e-mobility landscape to provide different e-mobility services. This further implies additional ICT-challenges on the CWD technology regarding the management of the charging processes at the CWD-EVSE. The CWD-EVSE should be able to authenticate each one of the EVs that are moving dynamically along the coils in the CWD-lane. For each of the EVs, the CWD-EVSE needs to know which one it should provide energy and which one it shouldn’t, especially in the case when certain EV has charging service booked or has contractual prioritization. Moreover the EVSE has to keep tracking how much energy has been delivered to the target EV. Considering the dynamic- of the CWD case, these requirements are more challenging than the stationary inductive or conductive charging cases. Last but not least, the CWD-EVSE has to provide monitoring information about the technical and operational status of each coil along the lane. The CWD overall architecture is depicted in figure 2.
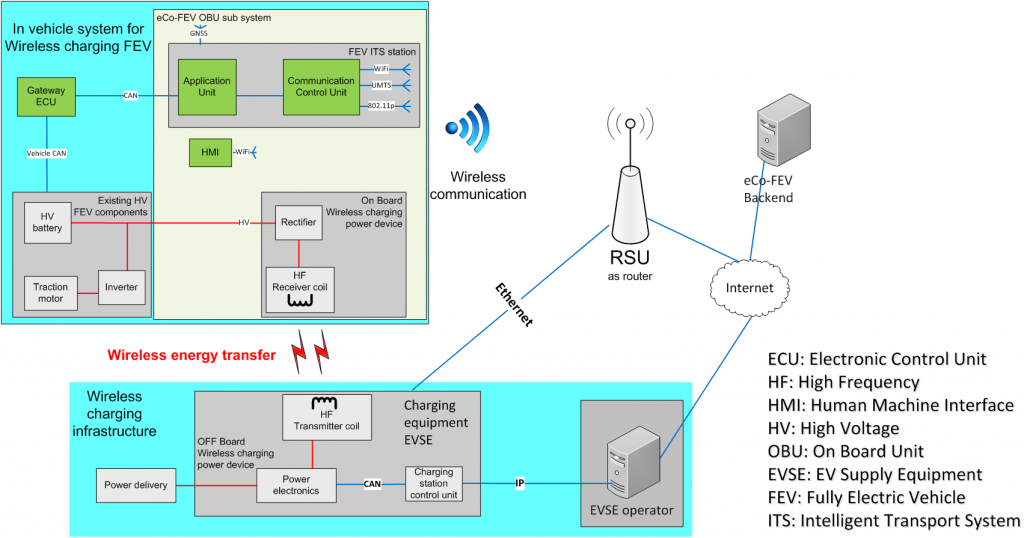 |
| Figure 2: CWD overall architecture |
From communication point of view, multiple communication media are used to satisfy the communication needs among sub systems and infrastructure systems. On one hand, dedicated ITS communications based on 5.9GHz (ITS G5) [4] is used to enable ad-hoc communication between FEVs and between FEVs and RSUs. On the other hand, legacy communication networks such as cellular network and Internet are used for communication between FEVs to backend and between infrastructure systems. One of the technical challenges is to enable continuous connectivity of FEV to backend. Depending on the radio coverage of the area where the FEV is located, FEV will be able to switch from an Access Network to another (handover) in order to stay connected. The continuity of the connectivity will be ensured by the use of IPv6 protocols that provide mobility support, such as Mobile IPv6 and Network Mobility (NEMO) protocols [5]. In addition, management functionalities are specified to dynamically select the appropriate media and communication path to establish the communication based on requirements defined by the application.
The architecture design challenge for the eCo-FEV system comes from the requirement of its flexibility and modularity for the purpose of enabling various business models. The implementation and specifications of standardized interfaces between stakeholders’ IT systems are essential to support such modularity requirement. The eCo-FEV project has identified a set of relevant interfaces that should be exposed, for example:
Web service interface for session oriented communication between FEV and service provider;
Open interface to enable user authentication and user data access right management assuming the separation of ID provider (e.g. an OEM that wants to control the customer information) and service providers in a potential business model;
DATEX II [6] interface that enables the exchange of traffic and weather information between traffic management centers and service providers;
Interface that enables vehicle charging infrastructures to provide real time charging facilities availability information to service providers;
Interface that provides local information to vehicles via Cooperative ITS, such as a POI message that provides charging spot availability via wireless communications [7];
Interface for Vehicle to Grid communication (ISO 15118) [3] and its extensions for CWD;
Machine-to-Machine (M2M) interface that enables data exchanges between eCo-FEV backend and FEV for battery State of Charge (SoC) and State of Health (SoH) monitoring;
Interface between EVSE and EVSE operator such as Open Charge Point Protocol (OCPP) specifications[8];
Some of the above mentioned interfaces are already standardized (e.g. C-ITS communication) and even deployed (e.g. DATEX II). For other interfaces, either extensions are required to the existing standards due to the new technical features, or standardization is missing to our best knowledge. An example is the M2M interface for FEV data collection by service provider and it seems that standardized exchange message model does not exist. Thus, the eCo-FEV project is targeted to provide technical specifications to relevant standard bodies (ETSI, CEN).
The eCo-FEV system will be validated and applications will be evaluated in two different testing sites in France (Region of Isere) and in Italy (Region of Turin). Each testing site presents distinguished requirements for both mobility needs and operational conditions of existing traffic and charging infrastructure systems. Partners of the eCo-FEV project include Car Manufacturers, road operators, IT technology providers, energy providers and research institutes. The project is co-funded by European Commission and coordinated by Hitachi Europe Ltd.
References
[1] COMMISSION COMMUNICATION “A EUROPEAN ECONOMIC RECOVERY PLAN”, COM (2008) 800, page 15;
[2] eCo-FEV project website. Available at http://www.eco-fev.eu
[3] ISO 15118: Road vehicles — Vehicle to grid communication
[4] ETSI EN 302 663 V1.2.1 (2013-07): Intelligent Transport Systems (ITS); Access layer specifications for Intelligent Transport Systems operating in the 5 GHz frequency band.
[5]IETF RFC 3963: Network Mobility (NEMO) Basic Support Protocol. Available at http://tools.ietf.org/html/rfc3963
[6] http://www.datex2.eu/
[7] ETSI TS 101 556-1 V1.1.1 (2012-07) Intelligent Transport Systems (ITS); Infrastructure to Vehicle Communication; Electric Vehicle Charging Spot Notification Specification
[8] OCPP 1.5 Stub Developer Guide, 3 January 2013, V0.2
 Nadim El Sayed: graduated with distinction from the Technische Universität Berlin (TUB) in Computer Engineering in 2010, and received a distinction award from the VDI in 2011. Since then he has been a researcher at the DAI-Labor, TUB. He was involved in many national and EU projects such as SmartSenior, Gesteuertes Laden 2.0, BMBF-ILIAS, IDBB, and EU FP7 project PERIMETER. Currently he is involved in several national projects in the E-Mobility Area, (Schaufenster projects), and in the EU eCo-FEV project. In the course of his work at DAI-Labor, he co-authored an open source library for smart-metering, and various scientific articles published on international conferences.
Nadim El Sayed: graduated with distinction from the Technische Universität Berlin (TUB) in Computer Engineering in 2010, and received a distinction award from the VDI in 2011. Since then he has been a researcher at the DAI-Labor, TUB. He was involved in many national and EU projects such as SmartSenior, Gesteuertes Laden 2.0, BMBF-ILIAS, IDBB, and EU FP7 project PERIMETER. Currently he is involved in several national projects in the E-Mobility Area, (Schaufenster projects), and in the EU eCo-FEV project. In the course of his work at DAI-Labor, he co-authored an open source library for smart-metering, and various scientific articles published on international conferences.
 Lan LIN got her Master degree in 2002 at Civil Engineering School (Ecole Nationale des Ponts et Chaussees) in France and joined Hitachi Europe (ICT lab in Sophia Antipolis) shortly after. She is senior researcher on Intelligent Transport System. She has been involved in R&D projects in the field of ITS, vehicular communications, smart mobility and smart city such as iTETRIS, COVEL, SCORE@F, PREDRIVE C2X, DRIVE C2X, eCo-FEV, AutoNet2030 etc. She is currently acting chair of ETSI TC ITS WG1 (application and user requirements) and rapporteur of several standard Work Items for Cooperative ITS, as well as co-chair of European Car to Car Communication Consortium (C2C-CC) application working group.
Lan LIN got her Master degree in 2002 at Civil Engineering School (Ecole Nationale des Ponts et Chaussees) in France and joined Hitachi Europe (ICT lab in Sophia Antipolis) shortly after. She is senior researcher on Intelligent Transport System. She has been involved in R&D projects in the field of ITS, vehicular communications, smart mobility and smart city such as iTETRIS, COVEL, SCORE@F, PREDRIVE C2X, DRIVE C2X, eCo-FEV, AutoNet2030 etc. She is currently acting chair of ETSI TC ITS WG1 (application and user requirements) and rapporteur of several standard Work Items for Cooperative ITS, as well as co-chair of European Car to Car Communication Consortium (C2C-CC) application working group.
About the Newsletter
Editors-in-Chief

Jin-Woo Ahn
Co-Editor-in-Chief

Sheldon Williamson
Co-Editor-in-Chief
TEC Call for Articles 2023 - Advances in Charging Systems
The TEC eNewsletter is now being indexed by Google Scholar and peer-reviewed articles are being submitted to IEEE Xplore.
To submit an article click here.